
LV005-MIPI-Sensor接口原理图
后面准备学习一下 D-PHY 接口,在学习之前,我们先来看一个实际的 MIPI 接口的 Sensor 电路原理图。
一、RK3568 Camera 接口
1. 相关资料
鲁班猫 2 使用的是 RK3568 的主控芯片,一些相关资料如下:
2. MIPI 接口
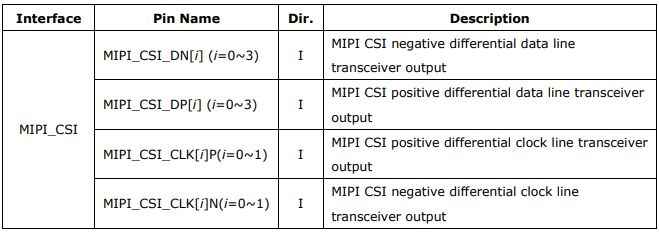
查看 Rockchip_RK3568_Datasheet_V1.3-20220929P,MIPI Interface 接口如下:
还可以参考《Rockchip_RK3568_TRM_Part2_V1.1-20210301.pdf》的 Chapter 28 MIPI CSI DPHY 这一节,这里描述了 RK3568 的 CSI DPHY 相关内容,从 28.1 Overview 这一部分我们可以知道,MIPI CSI DPHY 的特点如下:
根据 MIPI v1.2 规范设计
集成了 PHY 协议接口(PPI),支持 DSI/CSI 和 UniPro MIPI 协议
每通道最大数据传输速率为 2.5 Gbps
可扩展至支持 4 个数据通道,提供高达 10gbps 的传输速率
低功耗模式下每通道 10Mbps
支持单向和双向模式
二、OV8858
1. 相关资料
用的野火的 OV8858 摄像头模块:野火【摄像头_OV8858】模块,数据手册和电路原理图如下:
2. OV8858 摄像头接口
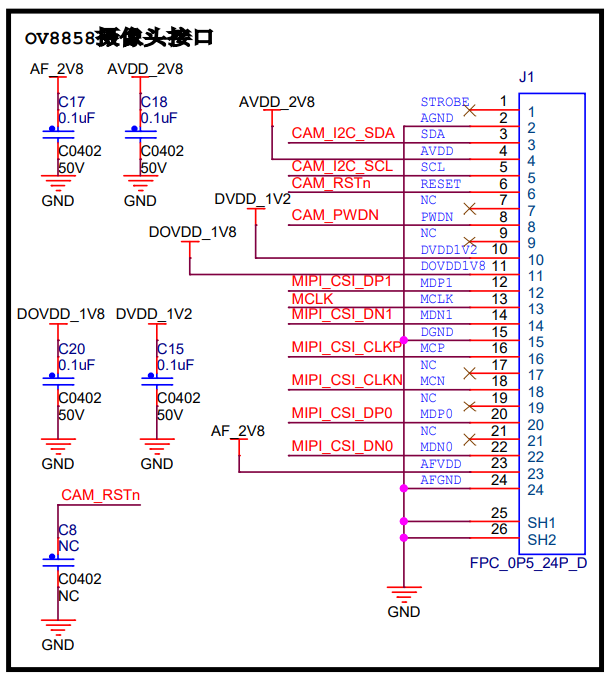 |  |
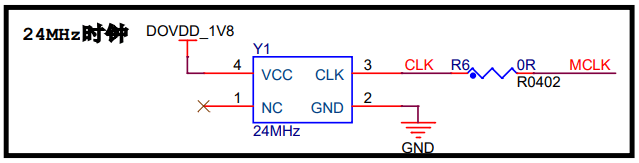
3. 24M 时钟
sensor 这里有一个外部 24M 时钟:
4. 模组内部结构图
三、鲁班猫 2
1. 相关资料
这里我使用的是野火的鲁班猫 2 的开发板来学习,所以这里的电路以这块开发板为准:
- 原理图在这里:LubanCat2_EBF410044V3R0_SCH_20240323.pdf
- 规格书在这里:鲁班猫 2 硬件规格书
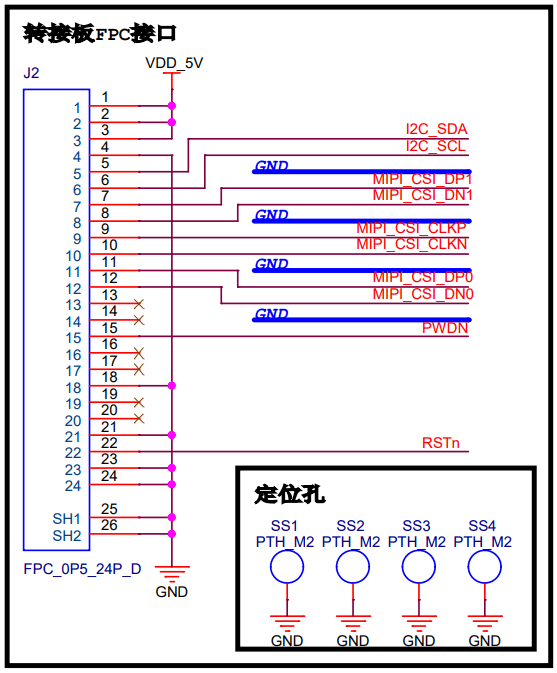
2. MIPI CSI 摄像头接口
我们打开原理图 LubanCat2_EBF410044V3R0_SCH_20240323.pdf 可以看到这里有两个 MIPI CSI 摄像头接口:
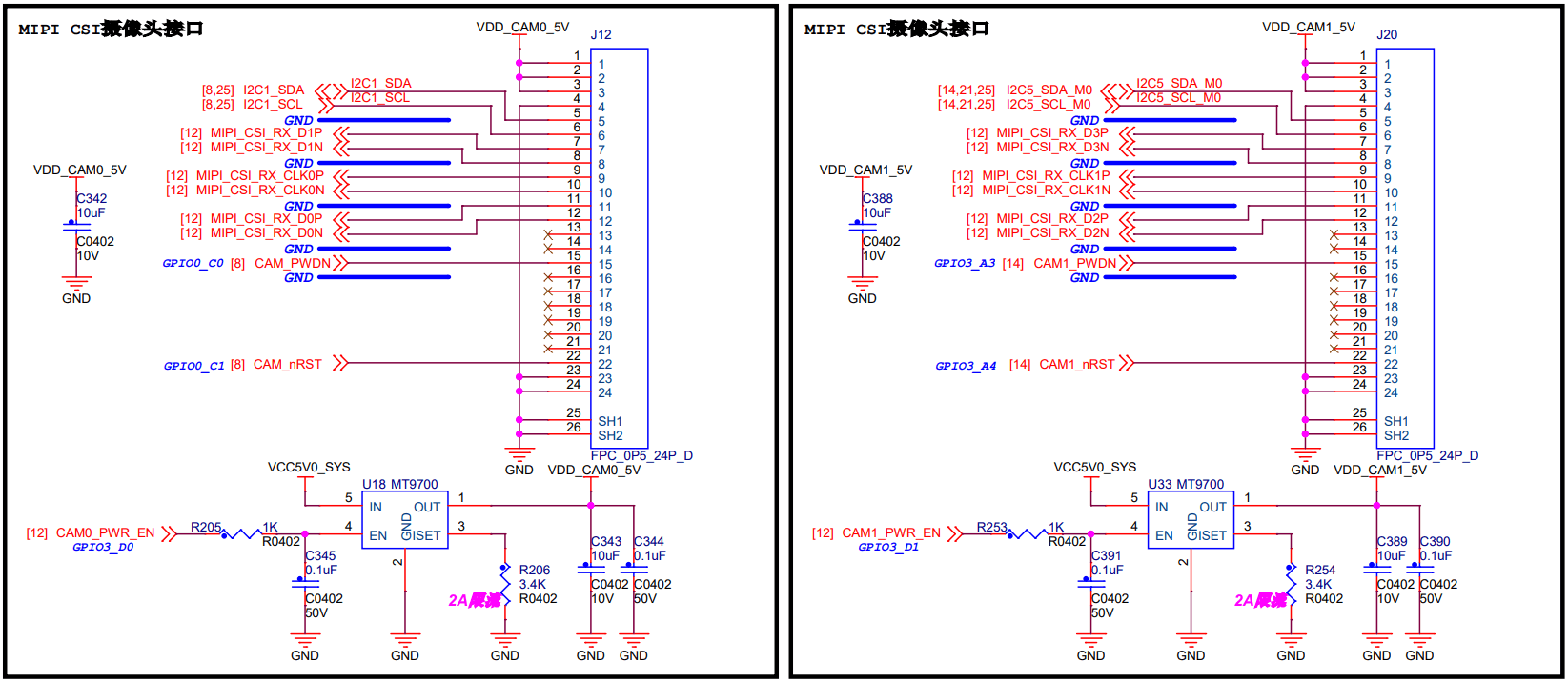
可以看到这两个接口的引脚顺序是一模一样的,只是用的 MIPI CSI 接口不同,前面的 OV8858 摄像头 FPC 接口的顺序也一样,所以最后接在哪一个上面都行,只要设备树资源对应就可以。
四、Camera 与 CPU
网上看到一个 Camera 与 CPU 模块图,刚好就是 RK3568 的,这里来分析一下:
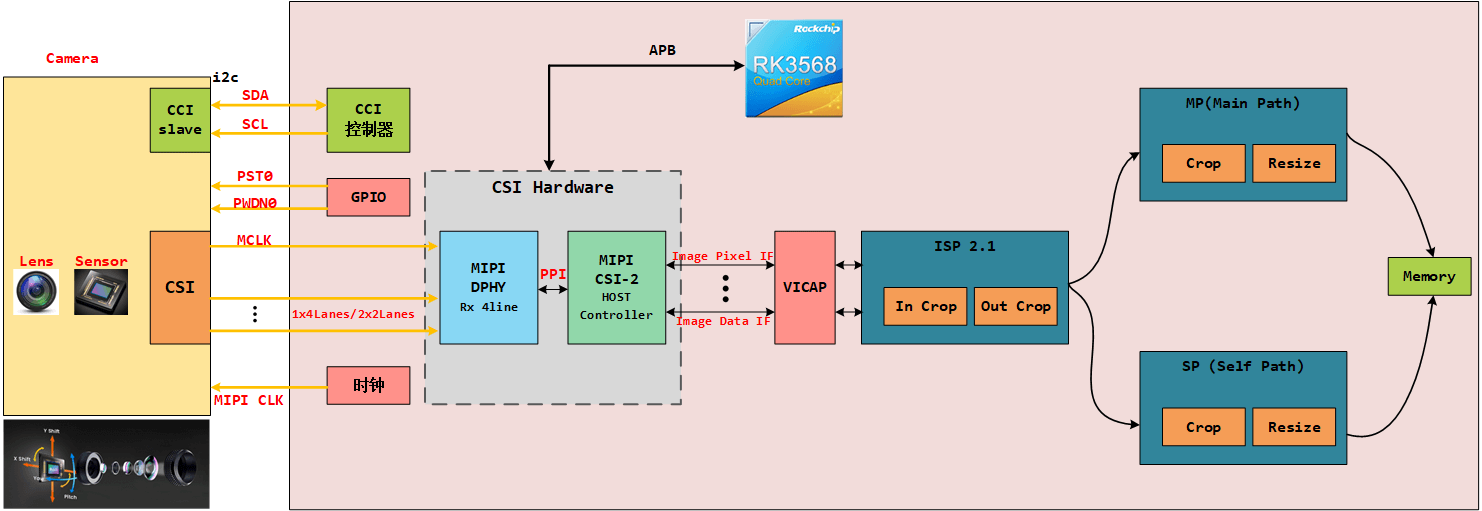
MIPI 接口在系统的实现如上图所示,
(1)通常一个 camera 的模组如图所示,通常包括 Lens、Sensor、CSI 接口等,其中 CSI 接口用于视频数据的传输;
(2)SoC 的 Mipi 接口对接 Camera,并通过 I2C/SPI 控制 camera 模组;
(3)MIPI DPHY 提供了 4 Lane 的 Rx 接口,由 Sensor 提供 Clock,并通过四条数据 Lane 输入图像数据;
(4)DPHY 与 CSI-2 Host Contrller 之间通过 PPI(PHY-Protocol Interface)相连,该接口包括了控制,数据,时钟等多条信号;
(5)CSI-2 Host Contrller 通过 PPI 接口收到数据后进行解析,完成后通过 IDI(Image Data Interface)或者 IPI(Image Pixel Interface)输出到 SoC 的其他模块(VICAP 或 ISP,rk3568 是送至 VICAP 模块);
(6)ISP 将处理过的图片输出到 MP 主通道或 SP 自身通道,SP 一般用来预览图片,SP 图片的最大分辨率比 MP 低;
(7)SoC 通过 APB Slave 总线控制 CSI-2 Host Contrller 的相关寄存器。
参考资料:
硬件开发笔记(十六):RK3568 底板电路 mipi 摄像头接口原理图分析、mipi 摄像头详解_rk3568 dvp-CSDN 博客