
LV040-传感器参数
后面学习的 senor 主要用的还是 CMOS,这里主要了解一下 CMOS 的一些参数指标。
集成电路 CMOS 图像传感器测试方法:GB/T 43063-2023 现行
一、量子效率 QE(Quantum Efficiency)
光线通过相机的镜头聚焦在图像传感器(CMOS)上,CMOS 由阵列式的光电二极管(PD)组成,光电二极管负责将光信号转化为电子信号。假落在光电二极管上的光子数量为 Qp,依据光电效应,转化为 Qe 个电子,即:Qe = η*Qp。
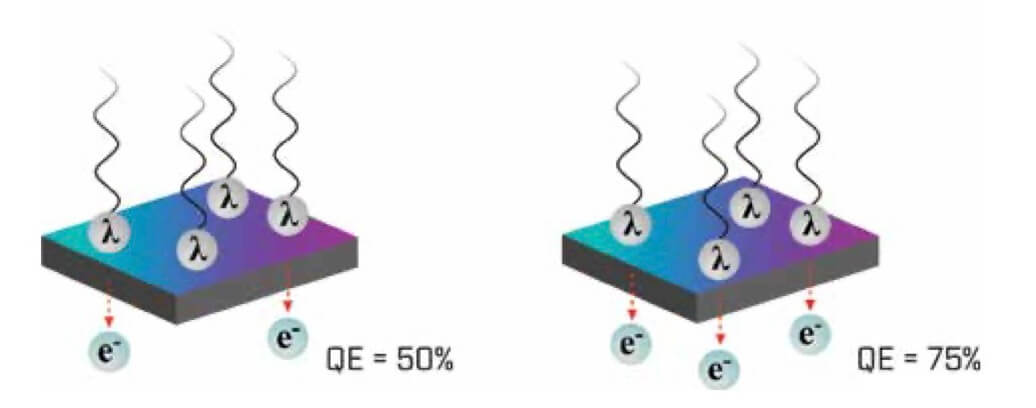
这里的 η 是光电转化效率,需要注意的是,这个转化率并不是 100%(即 1 光子转化为 1 个电子),而是有一定的损失。我们将转化率称为量子效率(Quantum Efficiency),越高的量子效率,意味着图像传感器的灵敏度越高。
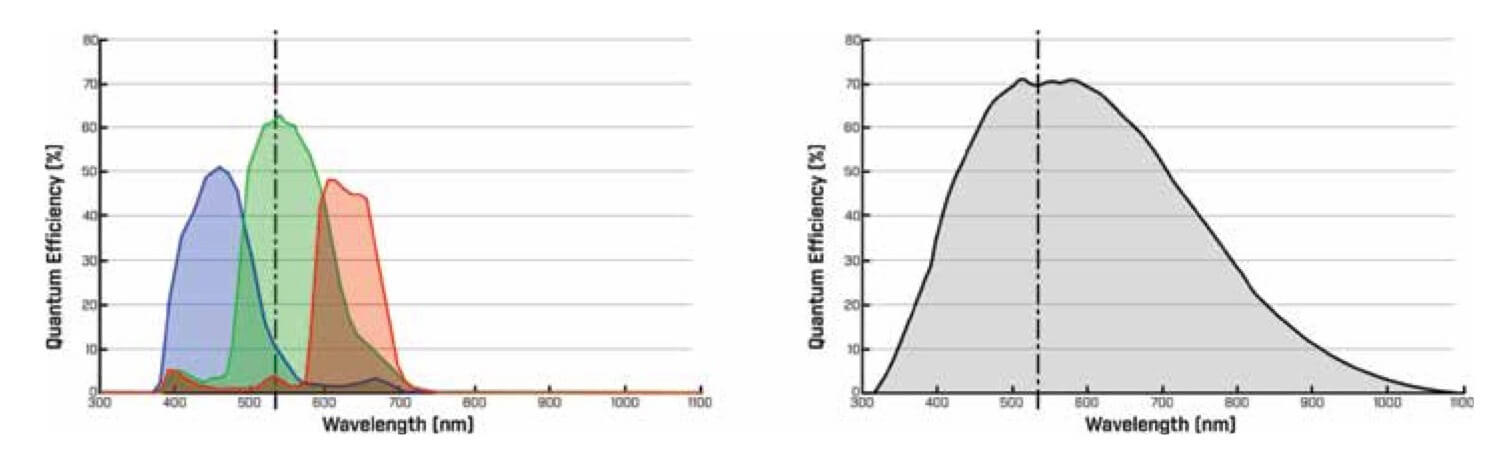
量子效率主要取决于光电二极管 p-n 结的结构和尺寸,通常在 10%-80%之间,并且跟波长有较大的关系。硅基半导体的禁带宽度(Band Gap)决定了其对绿光(波长 550nm)的量子效率最高,而对红外波段的感应效果最差,量子效率跟波长的关系大致如图所示。
二、暗噪声 DN(Dark Noise)
当没有任何光信号输入的时候,CMOS 传感器依然会产生一些电信号,这些电信号被称为暗噪声。暗噪声在图像上的呈现出随机噪点般的分布:
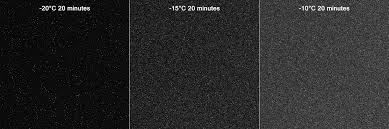
强度都比较弱,一般是 2-5 个电子 [e-] 的幅度。暗噪声跟温度的相关性较大,温度低的时候,暗噪声小,温度升高,暗噪声随之升高。由于汽车的工作温度范围较大,车载图像传感器一般要适应-40℃-80℃ 的工作温度,对暗噪声要求较高。
三、灵敏度阈值 AST(Absolute Sensitivity Threshold)
灵敏度阈值指的是最小可检测的信号强度,以光子数 [γ] 为单位。如图:
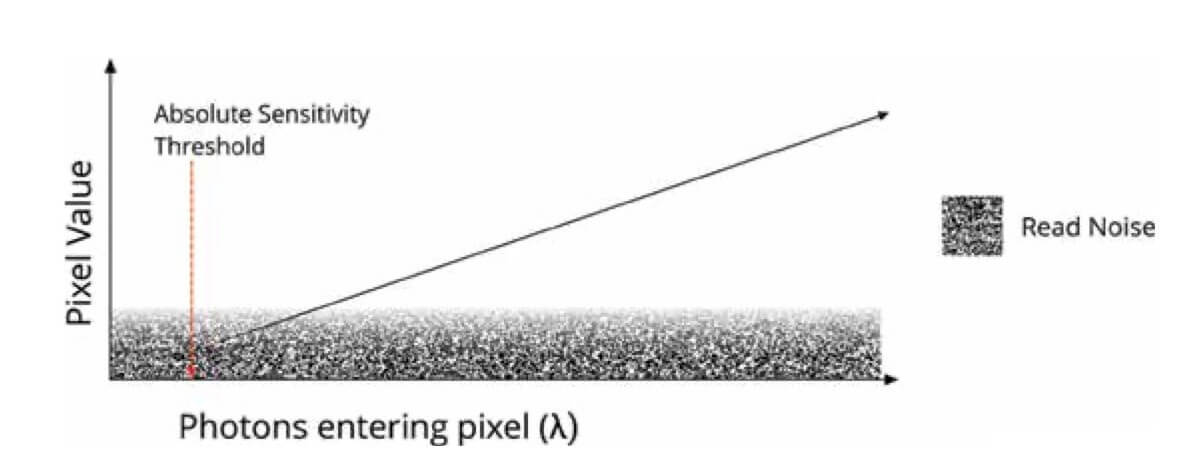
最小可检测信号受制于噪声水平的大小。如果噪声水平较高,那么 AST 的值就会相应地提高,对微弱信号的检测能力就会下降。例如夜晚暗光下的场景,如果要看清物体,就需要有更低的灵敏度阈值。
四、饱和值(Saturation Capacity)
饱和值代表了最大可检测的信号强度。光电二极管收到光照而产生的电子,需要临时存储在内置电容里,等待被读取。下图是电容饱和的示意图:
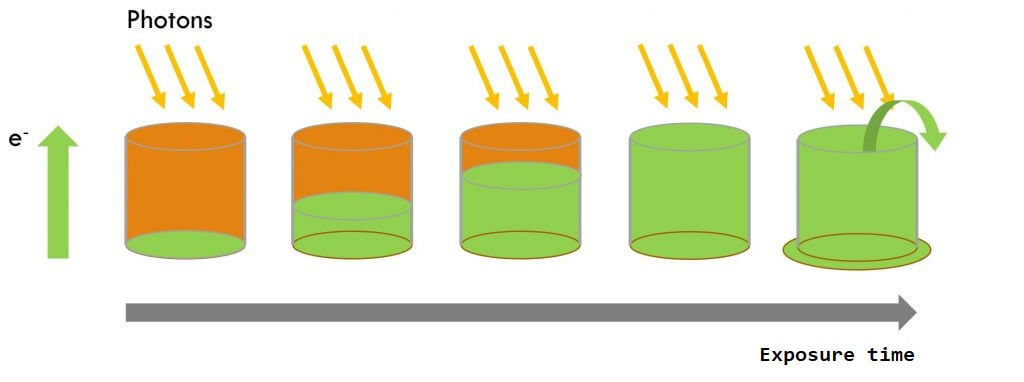
电容不断累积光电子,随着光电子数量的增加,电容逐渐饱和,无法再接收更多的光。电容的大小限制了最多能接收的光强度。饱和值越大,可检测的场景亮度越高,更适合在室外强光环境下工作。
当其中某个像素的光电二极管饱和之后,多余的电子容易溢出,影响其他的像素,从而产生拖尾效应,特别是对着太阳拍摄的时候,容易出现下图的情况。

过曝导致的拖尾效果
五、信噪比(SNR)
信噪比的定义是信号除以噪声,通常用分贝(dB)作为单位。更高的信噪比,意味着图像的对比度更清晰,在暗光环境下的性能更好,如下图所示:
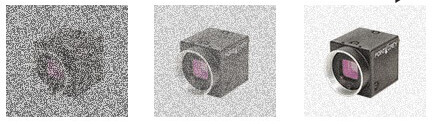
信噪比对图像质量的影响(从左到右信噪比逐渐增高)
通常的 CMOS 信噪比大约在 40dB 左右。分贝和比例是对数关系,每增加 10 分贝,信号与噪声的比例增加 10 倍。一般车载 CMOS 会比手机 CMOS 的信噪比大,因为车载 CMOS 有更大的像素尺寸。
六、动态范围(Dynamic Range)
动态范围指的是 CMOS 传感器能接收的最强光和最弱光之间的比例。越高的动态范围意味着相机越能同时适应暗光以及亮光的场景。例如在车载的应用上,汽车从阴暗的隧道中驶出时,如果动态范围太小,就会看不清隧道外的场景,容易发生安全隐患。如下图,左边是低动态范围的 CMOS,无法看清隧道外的场景,右图是高动态范围的 CMOS,可清楚地看到外部的场景。

七、像素相关参数
1. 像素(Pixel)
像素是所有图像传感器的最小感光单元,像素阵列排列在一起形成了图像传感器的感光区域。
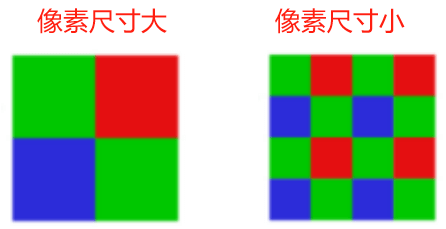
2. 像素尺寸
像元尺寸就是是指芯片像元阵列上的每个 pixel 的实际物理尺寸,通常的尺寸包括 14um、10um、9um、7um、6.45um、3.75um、3.0um、2.0um、1.75um、1.4um、1.2um、1.0um 等,也可以叫像素尺寸。例如 OV8858 这款 sensor 的芯片手册中就会有这么一个参数:

像元尺寸一定程度上可以反映芯片对光的响应能力,像元尺寸越大,能够接收到的光子数量越多。在同样的光照条件和曝光时间条件下,产生的电荷数量越多。对于弱光成像而言,像元尺寸是芯片灵敏度的一种表征。
3. 分辨率
常见分辨率的感性表述即 30 万、100 万、200 万,正确表述应该为 0.3M、1M、2M,其中 M 代表百万,是像素单位。Sensor 分辨率即指在单位面积上,像素的个数,数值越大,则代表像素点越多,捕获的图像细节越多,或者说图像更清晰。
表示方式:水平像素数 × 垂直像素数(例如 4000×3000 像素,1920x1080 像素)。
分辨率越高,图像细节越丰富,但也会增加数据量和处理需求。
4. 有效像素阵列
有效像素阵列是指在 sensor 的水平 H(Horizontal)和垂直 V(Virtical)方向上,分别含有的有效像素点的个数,很多时候,并不是所有感应器上的像素都能被运用。通常其余部分被用来表示黑色,H 与 V 的乘积一般等于或大于分辨率数值。
大多数 sensor 像素总数等于有效像素数,有的 sensor 存在黑电平参考区域,该区域内像素作为黑电平标定使用,不作为最终输出像素。例如 IMX335LQN_Flyer.pdf:
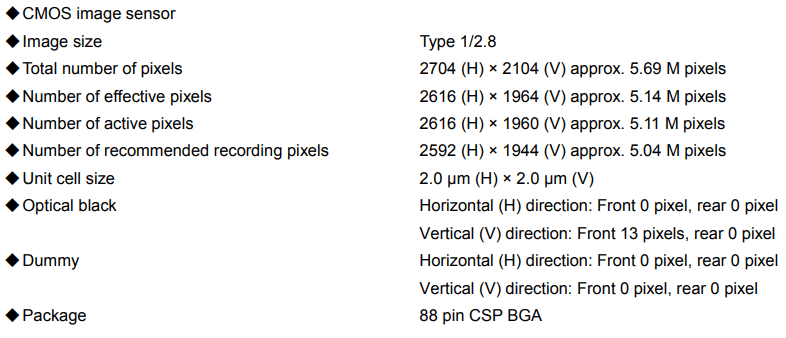
有效像素是 2616x1964,就是指所有可以用的像素,实际我们一般是使用推荐的像素 2592x1944,当后续需要裁剪/偏移之类的操作,可以留有余量。
5. 宽高比
宽高比(Aspect Ratio)是指传感器感光区域的 宽度与高度之间的比例关系,通常用冒号分隔的两个数字表示(如 4:3)。它决定了传感器捕获图像的基本形状,类似于画布的长宽比例。传感器本身由数百万个像素点阵列组成,宽高比直接影响这些像素的分布方式。例如,一个 4:3 的传感器意味着在水平方向每 4 个单位长度对应垂直方向 3 个单位长度。
- 传感器宽高比是硬件固有的,由传感器的物理尺寸决定。例如,全画幅传感器通常基于 35mm 胶片标准,采用 3:2 比例;而手机传感器多采用 4:3,以节省空间并适配显示屏。
- 宽高比不同于分辨率(如 1920x1080),后者指像素数量,但宽高比会影响分辨率的具体分配(如 16:9 的 1080p 视频,宽度为 1920 像素,高度为 1080 像素)。
宽高比的选择往往源于历史、行业标准或应用需求。以下是一些典型示例:
- 4:3:起源于早期电视和模拟摄像机,如今常见于手机摄像头、监控设备和微单相机。这种比例更接近正方形,适合肖像或文档拍摄,因为它在垂直方向有更多空间。
- 3:2:源自 35mm 胶片相机,是全画幅和 APS-C 画幅单反相机的标准。它更接近黄金比例,在风景和人像摄影中能提供平衡的构图。
- 16:9:随着高清电视和宽屏视频普及而成为主流,适用于电影、电视节目和网络视频,能最大化水平视野。
- 1:1:正方形比例,曾流行于中画幅胶片相机(如哈苏),现在多见于社交媒体(如 Instagram),强调对称和简洁。
- 其他比例:如 21:9(超宽屏电影)或 5:4(部分专业摄影),这些通常用于特殊场景。
宽高比的多样性反映了不同领域的优化需求:例如,视频强调宽屏沉浸感,而摄影可能更注重打印或裁剪灵活性。
6. 像素类型
主要分为 FSI(前照式)、BSI(背照式)、堆栈式(Stack)三种,FSI(前照式)金属配线层在 CFA 和光电二极管的中间,当光线进入二极管时会有损失,BSI(背照式)则将金属配线层放在了光电二极管的下面,光线透过彩色滤波片后可直接进入到光电二极管,不仅增大了进光量,且有效抑制光线射入角变化引起的感光度下降。堆栈式(Stark)则是背照式的进一步改良,将电路区域挪到了感光元件的底部,最大化了感光区域,同时也缩小了芯片的整体面积。
八、靶面尺寸
1. 什么是靶面尺寸
靶面尺寸的核心,是 相机图像传感器的物理大小,它是感光元件接收光线、形成图像的核心区域。靶面尺寸的本质:传感器的“成像范围边界”。
工业相机的靶面,对应传感器的有效感光区域,通常用“宽 × 高”或“对角线长度”描述(单位:mm)。它直接决定两个关键:
- 成像视野:靶面越大,相同焦距镜头下能覆盖的拍摄范围越广(比如 1 英寸靶面比 1/3 英寸靶面,在 25mm 镜头下视野宽 3 倍以上);
- 镜头适配性:只有镜头的“成像覆盖范围”能包住靶面,才能避免画面缺失。
2. 怎么计算?
2.1 直接尺寸(单位:mm)
这是最直接和精确的方式,通常表示为 宽度(W) x 高度(H),单位是毫米(mm)。
- 计算原理: 靶面尺寸 = 单个像素尺寸 x 该方向上的有效像素数
宽度 (W) = 像元尺寸(μm) * 水平有效像素数 (H_pixels) / 1000 (将 μm 转换为 mm)
高度 (H) = 像元尺寸 (μm) * 垂直有效像素数 (V_pixels) / 1000
- 举例: 一个相机像元尺寸是 3.45μm x 3.45μm,分辨率是 2448 x 2048。
宽度 W = 3.45 μm * 2448 / 1000 = 8.4456 mm ≈ 8.45 mm
高度 H = 3.45 μm * 2048 / 1000 = 7.0656 mm ≈ 7.07 mm
因此该相机的靶面尺寸约为 8.45mm x 7.07mm。
2.2 光学格式(单位:英寸 ")
是历史沿袭下来的表示法(源自早期的摄像管),用英寸表示,并带有引号(如 1/1.8 ", 1/2.5", 1 ", 2/3" 等)。这个个 英寸数并不是传感器的实际对角线长度!它是一个“光学格式”代号。实际对角线长度大约是标称值的 2/3。
- 计算原理:计算实际对角线尺寸(近似)
实际对角线长度 (mm) ≈ 光学格式标称值 (英寸) * 16 mm
为什么是 16? 这是历史约定俗成的转换系数(1 英寸光学格式对应的实际对角线约为 16mm)。是历史上 1 英寸显像管除去玻璃厚度之后实际有效显示面积是一个约 16mm 直径的圆,是个历史遗留下来的工业习惯问题。
- 举例:
标称 1 " 靶面:实际对角线 ≈ 1 * 16mm = 16mm
标称 2/3 " 靶面:实际对角线 ≈ (2/3) * 16mm ≈ 10.67mm
标称 1/1.8 " 靶面:实际对角线 ≈ (1/1.8) * 16mm ≈ 8.89mm
注意: 不同制造商、不同时期对同一标称格式(如 1/1.8 ")的传感器,其精确尺寸可能略有差异。因此,对于关键应用,务必查阅相机的详细规格书(Datasheet) 获取精确的宽高尺寸(单位 mm)。
2.2 对角线长度(单位:mm)
有时也会直接给出传感器的对角线长度(mm)。知道对角线长度和宽高比(通常为 4:3, 3:2 或 1:1),可以推算出宽度和高度(利用勾股定理)。
2.3 常见的靶面尺寸

3. 决定了哪些关键因素
3.1 视野 FoV
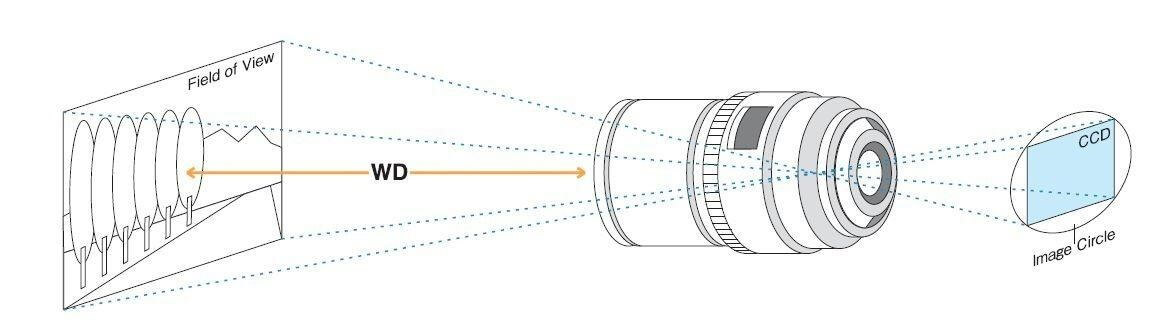
这是 最直接、最重要的影响。在相同的 工作距离(WD) 和 镜头焦距(f) 下,靶面越大,能看到的视野范围(FoV)就越宽。
可以参考 05-Camera/01-Camera 基础/LV020-透镜成像.md 中的视场角部分
3.2 镜头匹配
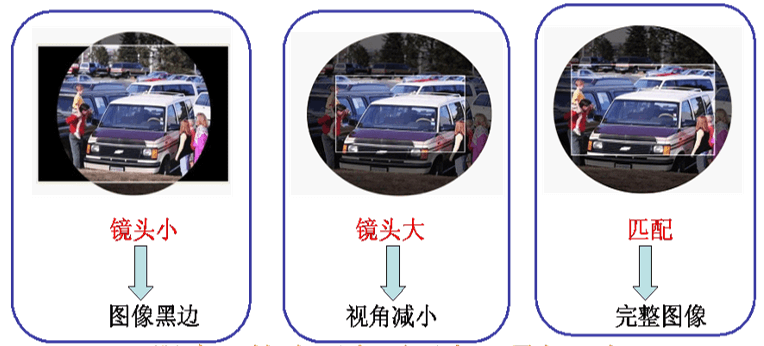
相机与镜头的靶面尺寸需要匹配。不匹配时可能会出现画面“黑角”、视野偏差,甚至重新采购镜头增加成本;也有人为追求“高端镜头”,用大靶面镜头搭配小靶面相机,造成性能浪费。
镜头的靶面尺寸,指的是 镜头能形成完整清晰成像圈的最大传感器尺寸——允许理解为镜头“覆盖能力”的上限。两者的匹配逻辑,直接影响成像效果:
- 镜头靶面 ≥ 相机靶面:成像圈能完全覆盖传感器,画面无黑角,成像完整(最优状态);
- 镜头靶面 < 相机靶面:成像圈无法覆盖传感器边缘,画面四角出现“黑角”(或暗角),严重时边缘区域无图像,直接导致检测漏判(如 PCB 边缘线路无法拍摄);
- 镜头靶面 远大于 相机靶面:虽无黑角,但镜头的“管用成像区域”仅用了中心部分,相当于“大马拉小车”——不仅浪费镜头性能(如高分辨率镜头的边缘画质未利用),还增加成本与设备体积(大靶面镜头通常更笨重)。
3.3 景深(Depth of Field - DoF)
在相同光圈值(F)和相同视野(FoV) 下(这意味着需要更换不同焦距的镜头来保证 FoV 相同):
使用 大靶面 相机通常需要搭配 更长焦距 的镜头来获得与小靶面相机相同的视野。
景深与焦距平方成反比 ,因此,使用更长焦距镜头的大靶面相机,在相同光圈和相同 FoV 下,其 景深会更浅(背景虚化更明显)。
如果保持相同焦距和光圈,那么大靶面相机视野更大,但其景深与小靶面相机在相同焦距光圈下(视野更小)的景深理论上是相同的。但实际应用中,为了获得特定视野,靶面大小直接影响所需镜头焦距,从而间接影响景深。
九、帧和帧率
1. 帧的概念
简单来说,一帧就是一副图像。显示器上面我们看到的画面就是一帧一帧的显示的。只不过显示的速度足够快,人眼以为画面是运动的。
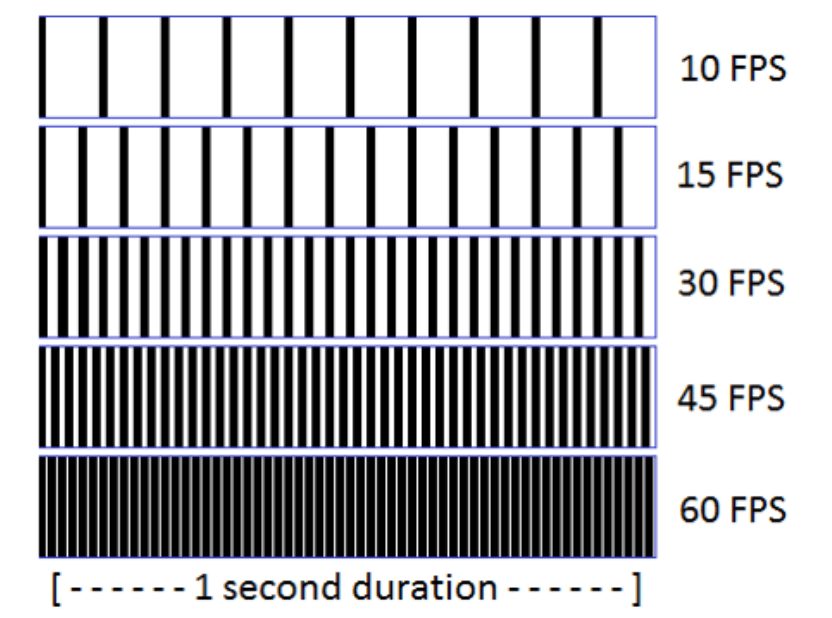
2. 帧率
帧率(Frame Rate),是指芯片在单位时间(每秒)内能够采集并输出完整图像帧的数量,单位为帧 / 秒(fps) 。图像传感器芯片通过像素阵列收集光线并将其转化为电信号,随后经过一系列复杂处理,如放大、模数转换等,最终形成数字图像帧。帧率表征了这一系列操作在每秒内完成的次数。例如,帧率为 60fps 的芯片,意味着每秒能将光线转化并处理成 60 个完整的数字图像帧输出。
十、时间相关参数
1. 像素时钟(MHz)
像素时钟频率(MHz):是控制像素输出的时钟,即pixel采样时钟,一个clk采集一个像素点 , 单位MHz。表示是每个单位时间内(每秒)采样的pixel数量。
2. 曝光时间(exposure_time)
曝光时间,指一帧曝光了多长时间,这里是绝对时间。单位用秒(s)、毫秒(ms)或微秒(us)表示。
3. H_Blank/V_Blank
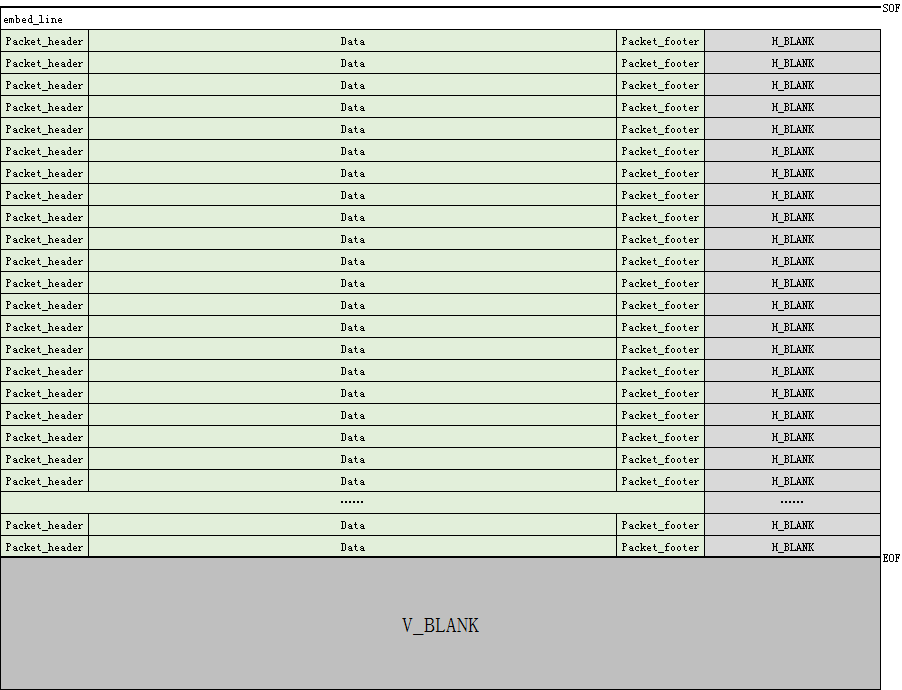
H_Blank:是指行消隐或称水平消隐,如下帧结构示意图所示,假定曝光起始位置在图像的左上角,对于逐行曝光的 sensor 来说,曝光从第一个像素开始,依次曝光直至这行的最后一个像素曝光结束,这时曝光位置要从此行的尾部快速移动到下一行的头部,开始下一行的曝光,这段行与行之间的返回过程称为H_Blank。
V_Blank:是指场消隐或称垂直消隐,如下帧结构示意图所示,假定曝光起始位置在图像的左上角,曝光完成一帧图像后,曝光位置要从图像的右下角返回左上角,开始新一帧的曝光,这一段时间间隔称为V_Blank。
参考资料:
相机(Camera)成像原理详解_相机成像原理-CSDN 博客
PBR 来龙去脉篇一:光和人眼感知颜色_人眼亮度敏感曲线-CSDN 博客
图像传感器原理介绍 (史上最详细的 CCD 和 CMOS 介绍)_微视界
全面详细解析 CMOS 和 CCD 图像传感器 - 吴建明 wujianming - 博客园
CMOS 图像传感器的参数和评价标准_cmos 弱光-CSDN 博客
工业相机与镜头靶面尺寸的关系:从原理到选型的避坑指南 - 教程 - ljbguanli - 博客园
(3 封私信) 工业相机的靶面是什么?它影响了哪些因素? - 知乎
(3 封私信) 键盘摄影(五)——相机成像元件:CMOS/CCD - 知乎
Camera 和 Image sensor 技术基础笔记(1) -- 光和 CCD/CMOS sensor 基础知识_sensor blooming-CSDN 博客