
LV001-STM32的SPI
一、SPI简介
这一部分可以查看笔记《60-通信专题/30-SPI/LV001-SPI简介.md》。
二、STM32的SPI外设
1. 简介
STM32 的 SPI 外设可用作通讯的主机及从机,支持最高的 SCK 时钟频率为 fpclk/2 (STM32F103 型号的芯片默认 f:sub:pclk1 为 36MHz, fpclk2 为72MHz),完全支持 SPI 协议的 4 种模式,数据帧长度可设置为 8 位或 16 位,可设置数据 MSB 先行或 LSB 先行。它还支持双线全双工、双线单向以及单线模式。其中双线单向模式可以同时使用 MOSI 及 MISO 数据线向一个方向传输数据,可以加快一倍的传输速度。而单线模式则可以减少硬件接线,当然这样速率会受到影响。我们这里只学习双线全双工模式。
2. 框图
关于STM32的SPI外设的框图,我们可以看 STM32中文参考手册的23.3 SPI功能描述一节:
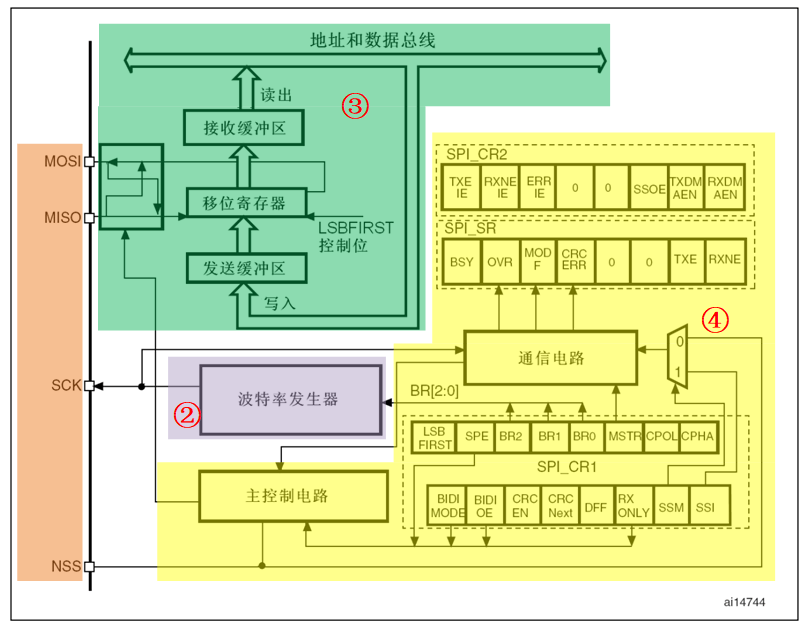
2.1 ①通讯引脚
SPI 的所有硬件架构都从图 24‑5 中左侧 MOSI、 MISO、 SCK 及 NSS 线展开的。 STM32 芯片有多个 SPI 外设,它们的 SPI 通讯信号引出到不同的 GPIO 引脚上,使用时必须配置到这些指定的引脚,见下表。关于 GPIO 引脚的复用功能,还是要查看STM32参考手册。
| 引脚 | SPI1 | SPI2 | SPI3 |
|---|---|---|---|
| NSS | PA4 | PB12 | PA15 下载口的 TDI |
| CLK | PA5 | PB13 | PB3 下载口的 TDO |
| MISO | PA6 | PB14 | PB4 下载口的 NTRST |
| MOSI | PA7 | PB15 | PB5 |
其中 SPI1 是 APB2 上的设备,最高通信速率达 36Mbtis/s, SPI2、 SPI3 是 APB1 上的设备,最高通信速率为 18Mbits/s。除了通讯速率,在其它功能上没有差异。其中 SPI3 用到了下载接口的引脚,这几个引脚默认功能是下载,第二功能才是 IO 口,如果想使用 SPI3 接口,则程序上必须先禁用掉这几个 IO 口的下载功能。一般在资源不是十分紧张的情况下,这几个 IO 口是专门用于下载和调试程序,不会复用为 SPI3。 当用到SPI3的时候,需要注意我们下载的时候要按着reset复位按键,然后再下载,当芯片处于复位状态时,才能正常下载。
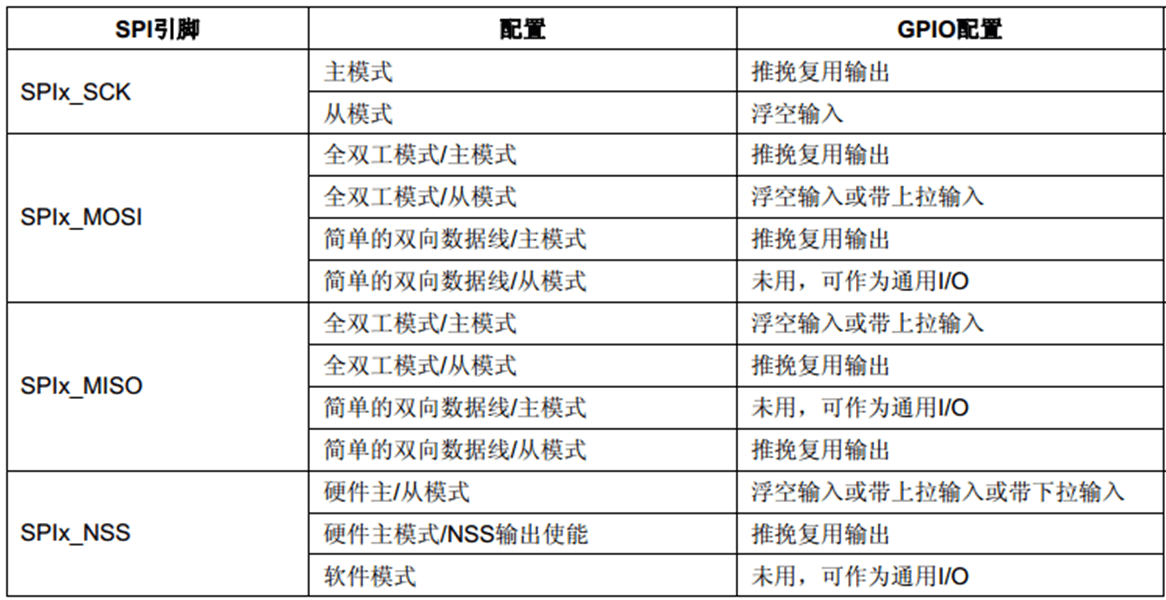
实际应用中,我们一般不使用 STM32 SPI 外设的标准 NSS 信号线,而是更简单地使用普通的GPIO,软件控制它的电平输出,从而产生通讯起始和停止信号。NSS引脚通过配置寄存器,配置成通过软件来控制的形式,这样只要在需要启动SPI的时候将NSS拉低就可以了,不一定非要接在PA4。
对于GPIO的复用模式,我们可以看STM32中文参考手册8.11小节:
2.2 ②时钟控制逻辑
SCK 线的时钟信号,由波特率发生器根据“控制寄存器 CR1”中的 BR[0:2] 位控制,该位是对 fpclk时钟的分频因子,对 fpclk 的分频结果就是 SCK 引脚的输出时钟频率,计算方法见下表。
| BR[0:2] | 分频结果 (SCK 频率) | BR[0:2] | 分频结果 (SCK 频率) |
|---|---|---|---|
| 000 | fpclk/2 | 100 | fpclk/32 |
| 001 | fpclk/4 | 101 | fpclk/64 |
| 010 | fpclk/8 | 110 | fpclk/128 |
| 011 | fpclk/16 | 111 | fpclk/256 |
其中的 fpclk 频率是指 SPI 所在的 APB 总线频率, APB1 为 fpclk1, APB2 为 fpckl2。通过配置“控制寄存器 CR”的“CPOL 位”及“CPHA”位可以把 SPI 设置成 4 种 SPI模式中的一种。
2.3 ③数据控制逻辑
SPI 的 MOSI 及 MISO 都连接到数据移位寄存器上,数据移位寄存器的数据来源及目标接收、发送缓冲区以及 MISO、 MOSI 线。当向外发送数据的时候,数据移位寄存器以“发送缓冲区”为数据源,把数据一位一位地通过数据线发送出去;当从外部接收数据的时候,数据移位寄存器把数据线采样到的数据一位一位地存储到“接收缓冲区”中。通过写 SPI 的“数据寄存器 DR”把数据填充到发送缓冲区中,通讯读“数据寄存器 DR”,可以获取接收缓冲区中的内容。其中数据帧长度可以通过“控制寄存器 CR1”的“DFF 位”配置成 8 位及 16 位模式;配置“LSBFIRST 位”可选择 MSB 先行还是 LSB 先行。
2.4 ④整体控制逻辑
整体控制逻辑负责协调整个 SPI 外设,控制逻辑的工作模式根据我们配置的“控制寄存器(CR1/CR2)”的参数而改变,基本的控制参数包括前面提到的 SPI 模式、波特率、 LSB 先行、主从模式、单双向模式等等。在外设工作时,控制逻辑会根据外设的工作状态修改“状态寄存器(SR)”,我们只要读取状态寄存器相关的寄存器位,就可以了解 SPI 的工作状态了。除此之外,控制逻辑还根据要求,负责控制产生 SPI 中断信号、 DMA 请求及控制 NSS 信号线。
3. 通讯过程
STM32 使用 SPI 外设通讯时,在通讯的不同阶段它会对“状态寄存器 SR”的不同数据位写入参数,我们通过读取这些寄存器标志来了解通讯状态。 我们可以查看 STM32中文参考手册的 23.3.5 数据发送与接收过程部分。
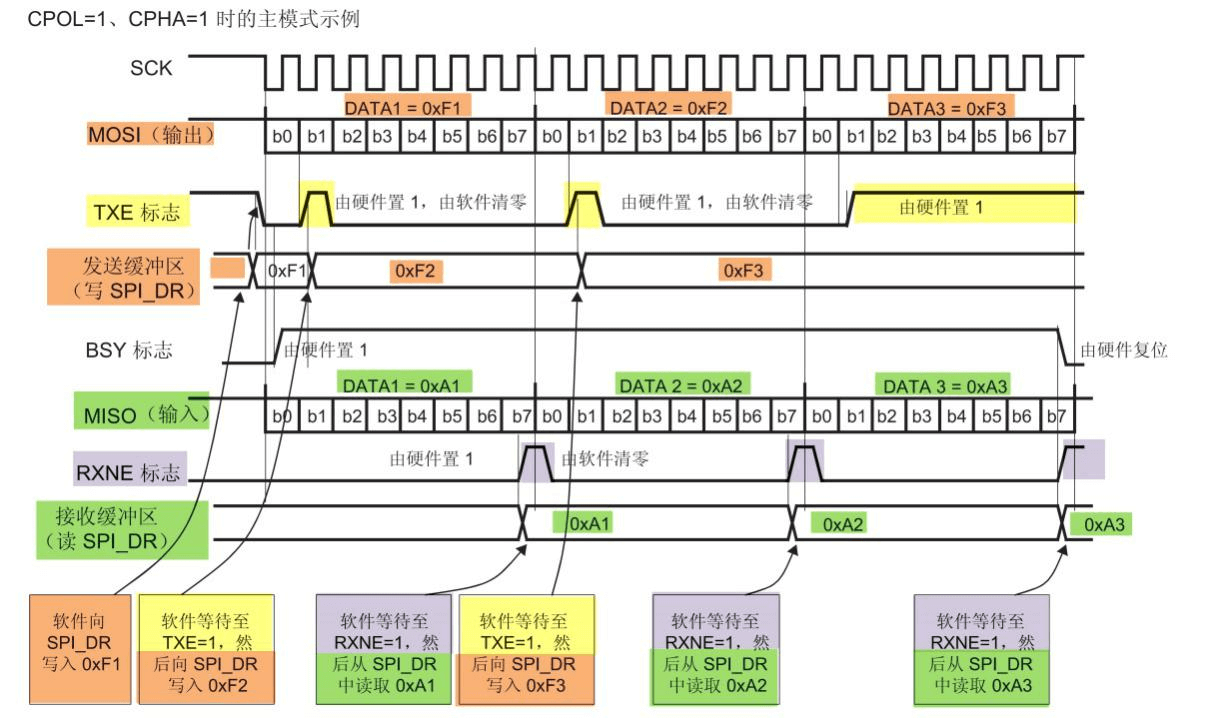
主模式收发流程及事件说明如下:
(1)控制 NSS 信号线,产生起始信号 (图中没有画出);
(2)把要发送的数据写入到“数据寄存器 DR”中,该数据会被存储到发送缓冲区;
(3)通讯开始, SCK 时钟开始运行。 MOSI 把发送缓冲区中的数据一位一位地传输出去; MISO则把数据一位一位地存储进接收缓冲区中;
(4)当发送完一帧数据的时候,“状态寄存器 SR”中的“TXE 标志位”会被置 1,表示传输完一帧,发送缓冲区已空;类似地,当接收完一帧数据的时候,“RXNE 标志位”会被置 1,表示传输完一帧,接收缓冲区非空;
(5)等待到“TXE 标志位”为 1 时,若还要继续发送数据,则再次往“数据寄存器 DR”写入数据即可;等待到“RXNE 标志位”为 1 时,通过读取“数据寄存器 DR”可以获取接收缓冲区中的内容。
假如我们使能了 TXE 或 RXNE 中断, TXE 或 RXNE 置 1 时会产生 SPI 中断信号,进入同一个中断服务函数,到 SPI 中断服务程序后,可通过检查寄存器位来了解是哪一个事件,再分别进行处理。也可以使用 DMA 方式来收发“数据寄存器 DR”中的数据。
【注意】:发送和接收是同时进行的,当我们只想接收数据的时候也还是需要向发送缓冲区写数据,这样才能触发SPI产生时钟驱动数据的传输,当然我们写入的数据可以是任意的,只要有数据写进去就可以。
4. SPI在那个总线?
这个我们可以看一下系统框图:
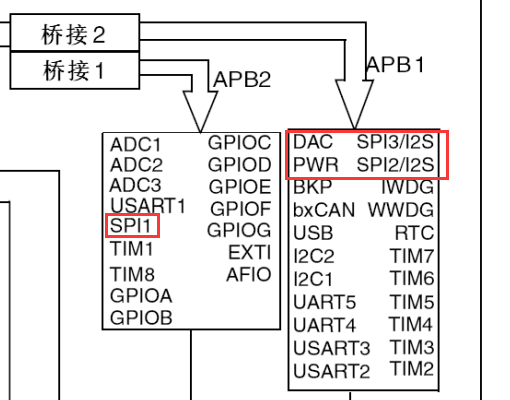
会发现,这里SPI1挂载在APB1总线,最高时钟就是36MHz,剩下两个挂载在APB2总线,最高时钟源为72MHz,根据这些信息来控制SPI的时钟。
三、相关寄存器
这一部分我们可以查看 STM32中文参考手册的23.5 SPI和I2S寄存器描述。我们可以用半字(16位)或字(32位)的方式操作这些外设寄存器。
1. 控制寄存器 1(SPI_CR1)

2. 控制寄存器 2(SPI_CR2)

3. 状态寄存器(SPI_SR)

4. 数据寄存器(SPI_DR)

5. 配置寄存器(SPI_I2S_CFGR)

6. 预分频寄存器(SPI_I2SPR)

四、HAL库函数
1. SPI_InitTypeDef
typedef struct {
uint32_t Mode; /* 设置 SPI 的主/从机端模式 */
uint32_t Direction; /* 设置 SPI 的单双向模式 */
uint32_t DataSize; /* 设置 SPI 的数据帧长度,可选 8/16 位 */
uint32_t CLKPolarity;/* 设置时钟极性 CPOL,可选高/低电平 */
uint32_t CLKPhase; /* 设置时钟相位,可选奇/偶数边沿采样 */
uint32_t NSS; /* 设置 NSS 引脚由 SPI 硬件控制还是软件控制 */
uint32_t BaudRatePrescaler; /* 设置时钟分频因子, fpclk/分频数 =fSCK */
uint32_t FirstBit; /* 设置 MSB/LSB 先行 */
uint32_t TIMode; /* 指定是否启用 TI 模式 */
uint32_t CRCCalculation; /* 指定是否启用 CRC 计算 */
uint32_t CRCPolynomial; /* 设置 CRC 校验的表达式 */
} SPI_InitTypeDef;(1)Mode: 本成员设置 SPI 工作在主机模式 (SPI_MODE_MASTER) 或从机模式 (SPI_MODE_SLAVE ),这两个模式的最大区别为 SPI 的 SCK 信号线的时序,SCK 的时序是由通讯中的主机产生的。若被配置为从机模式, STM32 的 SPI 外设将接受外来的 SCK 信号。
(2)Direction:本成员设置 SPI 的通讯方向,可设置为双线全双工 (SPI_DIRECTION_2LINES),双线只接收 (SPI_DIRECTION_2LINES_RXONLY),单线SPI_DIRECTION_1LINE。
(3)DataSize: 本成员可以选择 SPI 通讯的数据帧大小是为 8 位 (SPI_DATASIZE_8BIT) 还是 16位 (SPI_DATASIZE_16BIT)。
(4)CLKPolarity 和 CLKPhase:这两个成员配置 SPI 的时钟极性 CLKPolarity 和时钟相位CLKPhase ,这两个配置影响到 SPI 的通讯模式,关于 CLKPolarity 和 CLKPhase 可以看前边的笔记。时钟极性 CLKPolarity 成员,可设置为高电平 (SPI_POLARITY_HIGH)或低电平 (SPI_POLARITY_LOW)。时钟相位 CPHA 则可设置为 SPI_PHASE_1EDGE(在SCK 的奇数边沿采集数据) 或 SPI_P HASE_2EDGE(在 SCK 的偶数边沿采集数据) 。
(5)NSS: 本成员配置 NSS 引脚的使用模式,可以选择为硬件模式 (SPI_NSS_HARD ) 与软件模式 ( SPI_NSS_SOFT ),在硬件模式中的 SPI 片选信号由 SPI 硬件自动产生,而软件模式则需要我们亲自把相应的 GPIO 端口拉高或置低产生非片选和片选信号。实际中软件模式应用比较多。
(6)BaudRatePrescaler: 本成员设置波特率分频因子,分频后的时钟即为 SPI 的 SCK 信号线的时钟频率。这个成员参数可设置为 fpclk 的 2、 4、 6、 8、 16、 32、 64、 128、 256 分频。
(7)FirstBit: 所有串行的通讯协议都会有 MSB 先行 (高位数据在前) 还是 LSB 先行 (低位数据在前) 的问题,而 STM32 的 SPI 模块可以通过这个结构体成员,对这个特性编程控制。
(8)TIMode :指定是否启用 TI 模式。可选择为使能 ( SPI_TIMO DE_ENABLE ) 与不是能( SPI_TIMODE_DISABLE )。
(9)CRCCalculation :指定是否启用 CRC 计算。
(10)SPI_CRCPolynomial: 这是 SPI 的 CRC 校验中的多项式,若我们使用 CRC 校验时,就使用这个成员的参数 (多项式),来计算 CRC 的值。
2. 数据传输
HAL_StatusTypeDef HAL_SPI_Transmit(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size, uint32_t Timeout);
HAL_StatusTypeDef HAL_SPI_Receive(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size, uint32_t Timeout);
HAL_StatusTypeDef HAL_SPI_TransmitReceive(SPI_HandleTypeDef *hspi, uint8_t *pTxData, uint8_t *pRxData, uint16_t Size, uint32_t Timeout);