
LV010-看门狗使用实例
一、独立看门狗
1. 硬件设计
独立看门狗属于 STM32F1 的内部资源,只需要软件设置好即可正常工作。我们通过LED灯来指示 STM32F1 的复位情况来看指示独立看门狗的喂狗情况。
2. STM32CubeMX配置
2.1 IWDG配置
独立看门狗的配置时间比较简单:
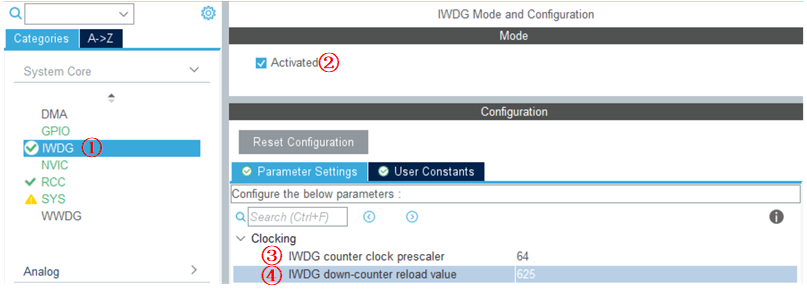
①、选择IWDG;
②、勾选Activated,表示启用独立看门狗;
③、看门狗的时钟分频,时钟源为40KHz,这里选择64分频;
④、重载寄存器初始值,这里设置为500。
根据前边计算溢出时间的公式,可以知道这样配置的话,溢出时间为Tout = prv/40 * rlr (s), prv 可以是 [4,8,16,32,64,128,256]。如果我们需要设置 1s 的超时溢出, prv 可以取 IWDG_ PRESCALER _64, rlr 取 625,这时 Tout=64/40*625=1s。
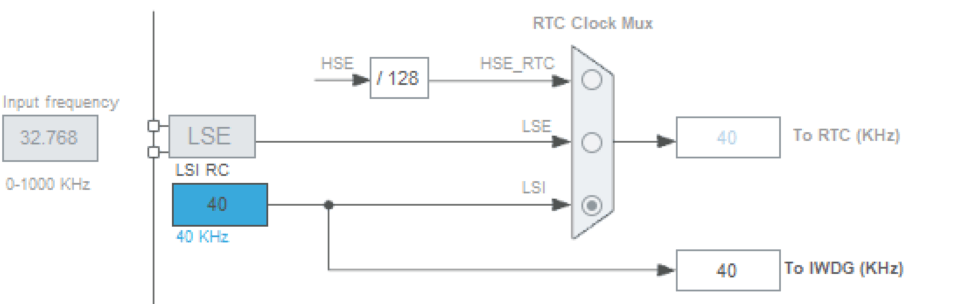
2.2 时钟树
3. 看门狗实现
3.1 初始化看门狗
void MX_IWDG_Init(void)
{
hiwdg.Instance = IWDG;
hiwdg.Init.Prescaler = IWDG_PRESCALER_64;
hiwdg.Init.Reload = 625;
if (HAL_IWDG_Init(&hiwdg) != HAL_OK)
{
Error_Handler();
}
}3.2 喂狗
HAL_StatusTypeDef HAL_IWDG_Refresh(IWDG_HandleTypeDef *hiwdg)
{
/* Reload IWDG counter with value defined in the reload register */
__HAL_IWDG_RELOAD_COUNTER(hiwdg);
/* Return function status */
return HAL_OK;
}3.3 测试函数
void IWDG_Test(void)
{
LED1 = 0; // LED亮
HAL_Delay(100); // 延时 100ms 再初始化看门狗,LED1 的变化"可见"
MX_IWDG_Init(); // 初始化看门狗
LED1 = 1; // 关闭LED1
while(1)
{
if(KEY_Scan() == WKUP_PRES) //如果 WK_UP 按下,喂狗
{
HAL_IWDG_Refresh(&hiwdg); //喂狗
}
delay_ms(10);
}
}3.4 测试现象
在编译成功之后,下载代码, 可以看到 LED1 不停的闪烁,证明程序在不停的复位,否则只会 LED1 常亮。这时我们不停的按 KEY_UP 按键,可以看到 LED1 就常亮了,不会再闪烁。
二、窗口看门狗
1. 硬件设计
窗口看门狗属于 STM32F1 的内部资源,只需要软件设置好即可正常工作。我们通过LED灯来指示 STM32F1 的复位情况和窗口看门狗的喂狗情况。
2. STM32CubeMX配置
2.1 WWDG配置
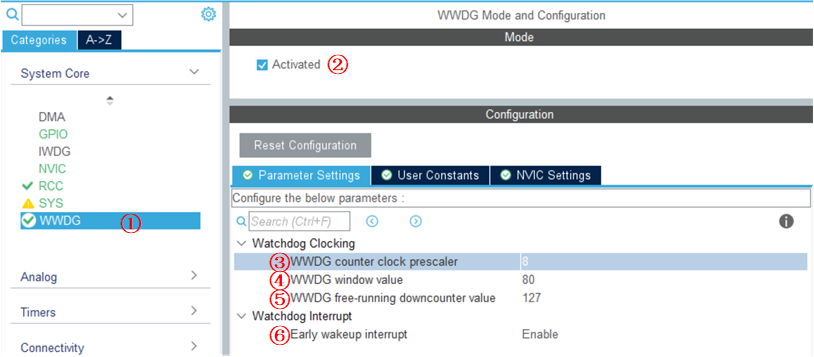
①、选择WWDG配置;
②、选择Activated,表示启用窗口看门狗;
③、窗口看门狗的分频数,这里选择为8;
④、设置窗口上边界值,范围:0x40~0x7F,换算成十进制就是44~127;
⑤、设置计数器的值,范围:0x40~0x7F,换算成十进制就是44~127,计数器会从这个值网下递减;
⑥、使能唤醒中断。
2.2 NVIC中断配置
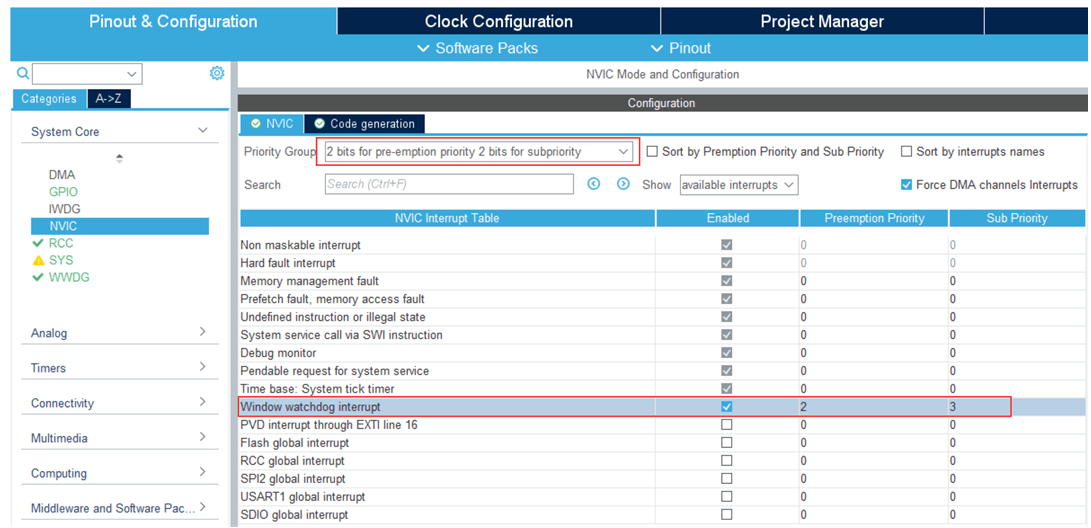
注意,这里不要把看门狗的中断优先级设置的太高,不然系统无法运行。
2.3 时钟树

3. 看门狗实现
3.1 初始化看门狗
void MX_WWDG_Init(void)
{
hwwdg.Instance = WWDG;
hwwdg.Init.Prescaler = WWDG_PRESCALER_8;
hwwdg.Init.Window = 80;
hwwdg.Init.Counter = 127;
hwwdg.Init.EWIMode = WWDG_EWI_ENABLE;
if (HAL_WWDG_Init(&hwwdg) != HAL_OK)
{
Error_Handler();
}
}3.2 配置底层及中断
void HAL_WWDG_MspInit(WWDG_HandleTypeDef* wwdgHandle)
{
if(wwdgHandle->Instance==WWDG)
{
__HAL_RCC_WWDG_CLK_ENABLE();
HAL_NVIC_SetPriority(WWDG_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(WWDG_IRQn);
}
}3.3 中断服务函数
void WWDG_IRQHandler(void)
{
HAL_WWDG_IRQHandler(&hwwdg);
}3.4 回调函数
这个是需要重写的,此函数会被 HAL_WWDG_IRQHandler()调用
void HAL_WWDG_EarlyWakeupCallback(WWDG_HandleTypeDef* hwwdg)
{
HAL_WWDG_Refresh(&hwwdg);//更新窗口看门狗值
LED1=!LED1;
}3.5 测试函数
int main()
{
// 其他的部分省略
LED1 = 0; //点亮 LED
HAL_Delay(300); // 延时 300ms 再初始化看门狗,LED 的变化"可见"
MX_WWDG_Init();
while (1)
{
LED1=1;
}
return 0;
}3.6 测试现象
当产生窗口看门狗中断的时候,会反转LED的电平,我们在while(1)中将LED持续性关闭,所以当进入看门狗中断的时候,LED被点亮,这样我们就会看到LED不断地闪烁,设就说明我们进入了看门狗的中断。