
LV020-串口收发实例
一、串口打印实现
说明,这里使用STM32CubeM进行配置和导出工程。
1. 硬件设计
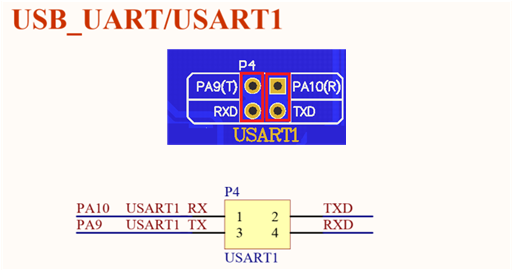
我使用的是正点原子的战舰V3,串口部分电路如下,串口 1 与 USB 串口并没有在 PCB 上连接在一起,需要通过跳线帽来连接一下。这里我们把 P4 的 RXD 和 TXD 用跳线帽与 PA9 和 PA10 连接起来。
2. STM32CubeMX配置
注意这里的时钟都没配置,会默认开启的,这一部分不涉及中断相关内容。
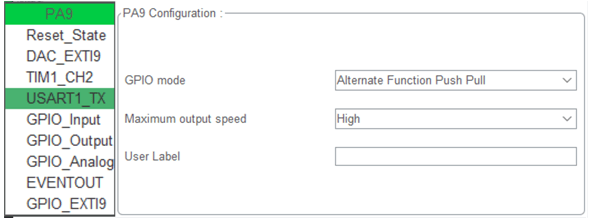
- (1)PA9配置(TXD)
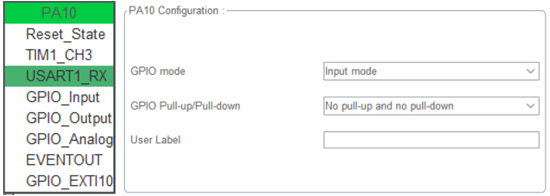
- (2)PA10配置(RXD)
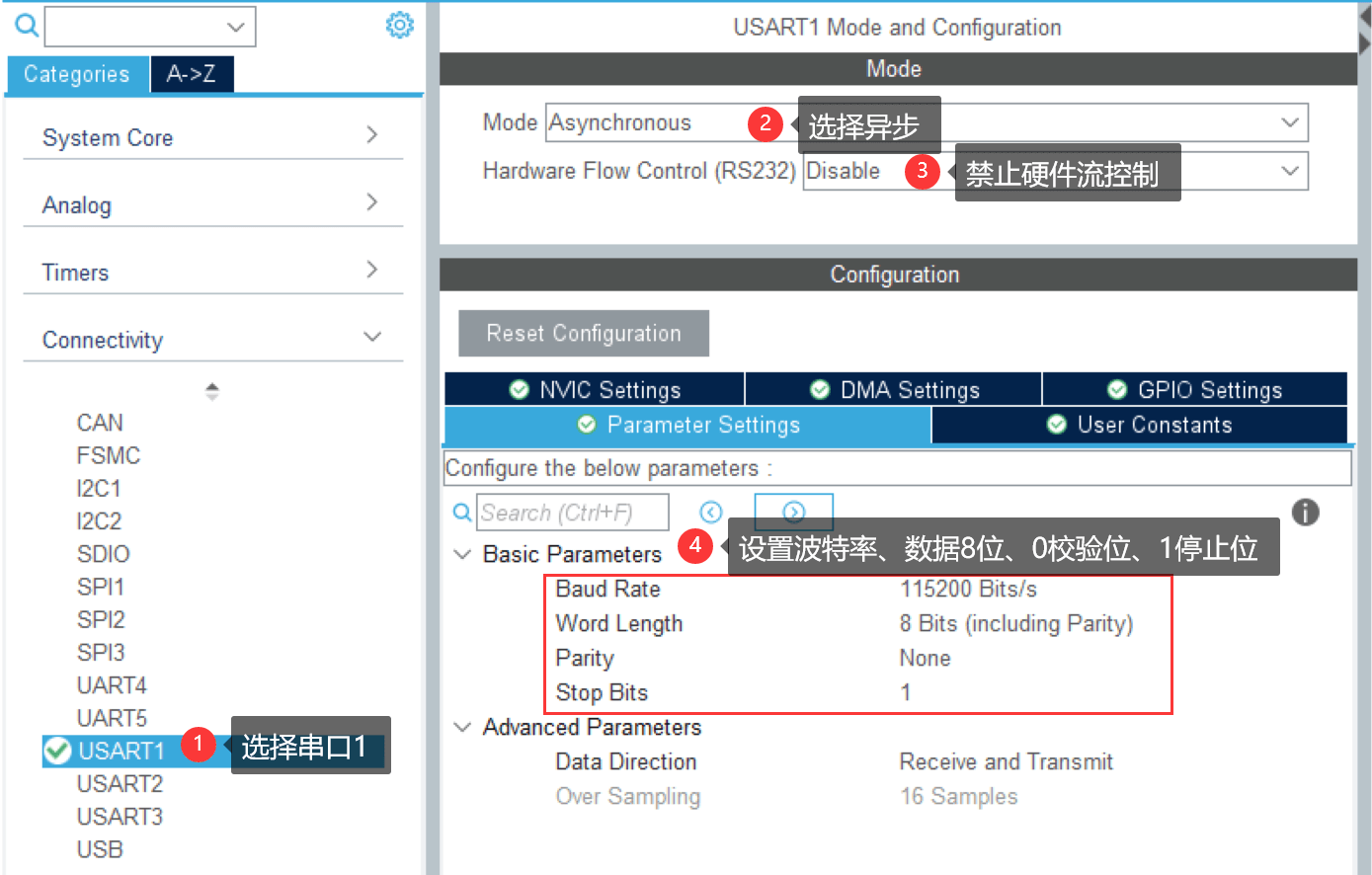
- (3)USART1配置
- (4)导出工程即可
3. 函数实现
上边只是完成了基础的初始化等功能,具体的接收,发送,库里边有对应的函数,我们自己写一下熟悉一下过程。
3.1 HAL库函数收发数据
HAL库提供了两个函数,让我们可以获取和发送数据,它们定义在 stm32f1xx_hal_uart.c:
HAL_StatusTypeDef HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout);
HAL_StatusTypeDef HAL_UART_Receive(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout);3.2 发送一个字节数据
void Uart_Putchar(uint8_t ch)
{
while( !(USART1->SR & (1<<6))); //等待DR为空
USART1->DR = ch;
}3.3 接收一个字节数据
uint8_t Uart_Getchar(void)
{
while(!(USART1->SR & (1<<5))); //等待RDR不为空,表示收到数据
return USART1->DR;
}3.4 printf实现
我们在编写C语言的时候,经常使用printf,还可以格式化打印,这是不是很方便呢?我们也可以在STM32中使用printf来调用串口,我们只需要重写下边这个函数就可以啦:
int fputc(int ch, FILE *f);我们重新定义该函数如下:
#include <stdio.h>
#include <string.h>
int fputc(int ch, FILE *f)
{
while((USART1->SR & (1<<6)) == 0); //等待DR为空,循环发送,直到发送完毕
USART1->DR = (uint8_t) ch;
return ch;
}4. printf的一个坑
当我们重写了fputc后,只要调用printf函数,程序直接卡死,有两种解决办法,第二种方法中说明了产生这个问题的原因。
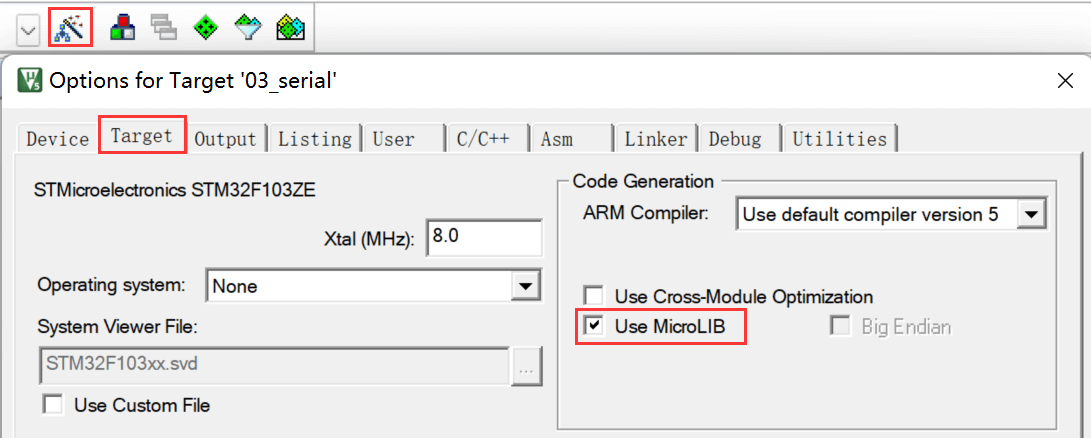
4.1 使用微库
在MDK5中点击【options for target】(常见的哪个魔术棒),在【Target】→【Use MicroLIB】勾选,使用微库。
4.2 避免使用半主机模式
4.2.1 半主机模式
半主机是用于 ARM 目标的一种机制,可将来自应用程序代码的输入/输出请求传送至运行调试器的主机。 例如,使用此机制可以启用 C 库中的函数,如 printf() 和 scanf(),来使用主机的屏幕和键盘,而不是在目标系统上配备屏幕和键盘。这种机制很有用,因为开发时使用的硬件通常没有最终系统的所有输入和输出设备。 半主机可让主机来提供这些设备。简单的来说,半主机模式就是通过仿真器实现开发板在电脑上的输入和输出。和半主机模式功能相同的是ITM调试机制。
在嵌入式的编程中我们要使用printf、fopen、fclose等函数的,但是因为嵌入式的程序中并没有对这些函数的底层实现,使得设备运行时会进入软件中断BAEB处,这时就需要__use_no_semihosting_swi 这个声明,使程序遇到这些文件操作函数时不停在此中断处。当目标板脱离仿真器(jlink/ulink)单独运行时,不能使用半主机模式。否则进入软件中断BAEB处,无法再执行下去,这就导致了卡死问题
4.2.2 关闭半主机模式
#pragma import(__use_no_semihosting)这条语句可以关闭半主机模式,只需要在任意一个C文件中加入即可。还有在使用keil编程的过程中还会遇到以下错误:
..\OBJ\USART.axf: Error: L6915E: Library reports error: __use_no_semihosting was requested, but _ttywrch was referenced说的大概的意思就是关掉了半主机模式,但是函数__ttywrch被引用了,这时要把函数重写一遍,当然出现其他的函数被要求的时候,可以参考上面的函数进行编写,只要放到任意一个.c源文件之中即可。所以我们可以在任意一个.c文件中添加如下内容:
//加入以下代码,支持printf函数,而不需要选择use MicroLIB
#if 1
#include <stdio.h>
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
void _sys_exit(int x)
{
x = x;
}
#endif二、开启串口中断
前边我们已经知道如何收发数据了,下边我们来看一下串口的中断操作。
1. 一般步骤
(1)使能相应的时钟
(2)配置GPIO管脚为串口功能
(3)设置中断优先级
(4)使能相应的中断
(5)实现中断服务程序
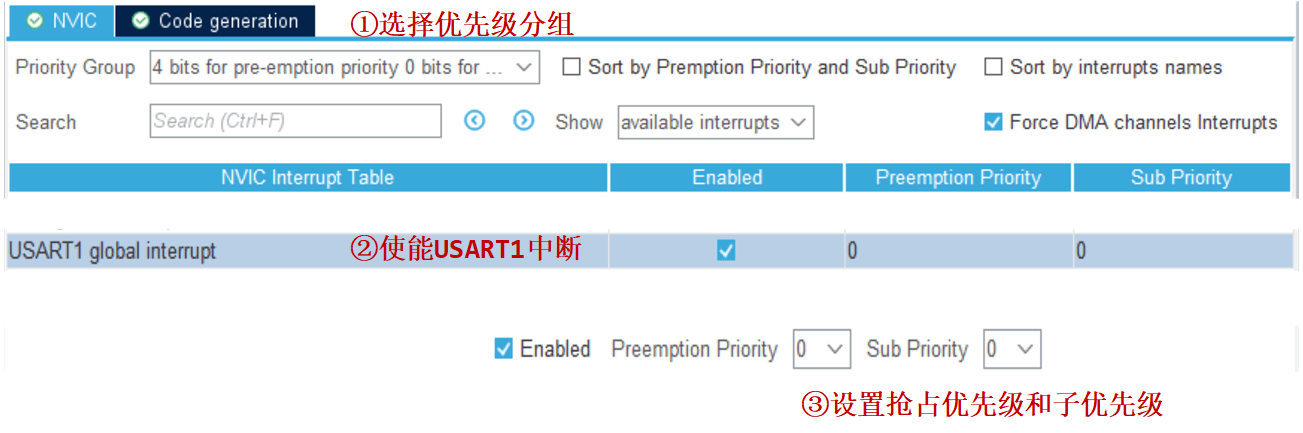
2. STM32CubeMX中断配置
对于GPIO等的配置,和前边保持一致,我们这里再加上中断的配置即可:
- NVIC配置
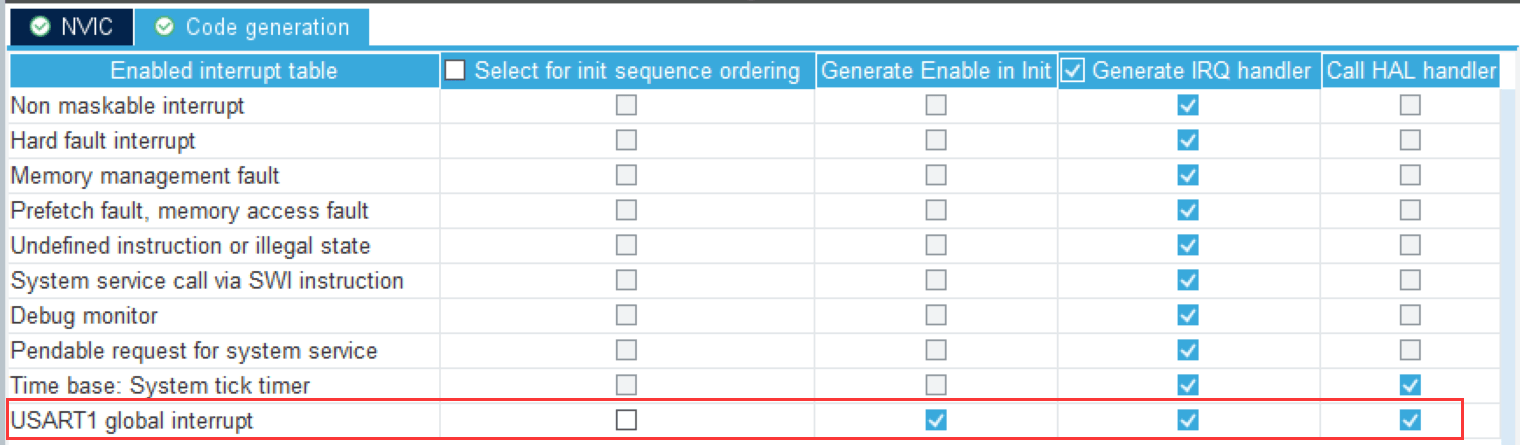
- Code generation
3. 编写中断服务函数
我们找到最终的中断服务函数回调函数:
USART1_IRQHandler()--->HAL_UART_IRQHandler()--->UART_Receive_IT()--->HAL_UART_RxCpltCallback()我们只需要在 HAL_UART_RxCpltCallback() 编写我们的接收中断发生后要实现的功能即可:
uint8_t RX[10] = {0};
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance == USART1)
{
printf("uart tx end\r\n");
}
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance == USART1)
{
printf("REV : %x %x\n",RX[0],RX[1]);
HAL_UART_Receive_IT(&huart1, RX, 2);// 为什么要有设么一句?后边再说
}
}4. 串口中断中的一个坑
这坑出现在接收数据的时候,有这样一个函数,这个函数是在发生接收中断的时候获取接收到的数据:
HAL_StatusTypeDef HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);最开始,我以为这个函数仅仅就是单纯的接收数据用的,但是,坑来了,我配置完串口以及串口中断后,无法产生串口中断。我去检查了串口引脚、串口是否配置了异步模式、串口全局中断是否打开、NVIC是否进行了配置,结果发现这些配置都正确,但是就是不发生接收中断。查阅各种资料及例程后,发现了这个函数的含义并不是我所想象的那么简单,我们来看一下函数原型:
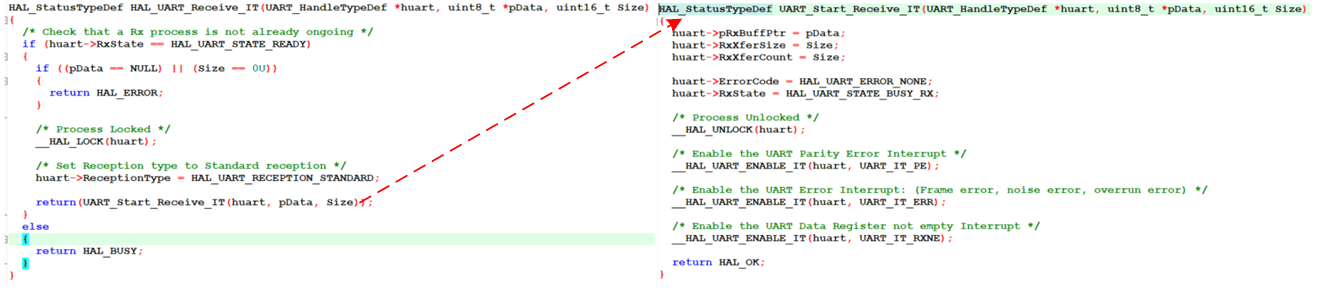
这个函数是以非阻塞模式接收一定数量的数据,第一个参数就是串口的句柄,我们使用的哪个串口就填那个串口的句柄地址,第二个参数是一个缓冲区,当中断发生的时候,接收到的数据会被存放在这里,第三个参数是大小,单位是字节,当我们填1的时候,接收到一个字节就会调用一次回调函数,当我们填10的时候,接收到的数据若不足10个字节,那么就不会调用回调函数,但是依然会产生接收中断。
我们可以试一下,若是我们程序从头到尾都没有调用这个函数的话,我们的接收中断是不会进入的,即便我们全局中断和串口中断都开起来了,我们仔细看上边的图,会发现内部调用了一个 UART_Start_Receive_IT () 函数,函数里边又调用了三个含有ENABLE_IT的函数,做的是不同的使能。
我们看注释,会发现,第三个在使能UART_IT_RXNE,我们来看一下他是啥,其实看注释也能知道,不过我们来追踪一下,印象深刻一些。我们可以定位到以下宏:
#define UART_CR1_REG_INDEX 1U
#define USART_CR1_RXNEIE_Pos (5U)
#define USART_CR1_RXNEIE_Msk (0x1UL << USART_CR1_RXNEIE_Pos) /*!< 0x00000020 */
#define USART_CR1_RXNEIE USART_CR1_RXNEIE_Msk /*!< RXNE Interrupt Enable */
#define UART_IT_RXNE ((uint32_t)(UART_CR1_REG_INDEX << 28U | USART_CR1_RXNEIE))我们再来看一下CR1寄存器:

其中的 bit[5]:RXNEIE,接收缓冲区非空中断使能 (RXNE interrupt enable) ,该位由软件设置或清除。 0:禁止产生中断; 1:当USART_SR中的ORE或者RXNE为’1’时,产生USART中断。
到这里就清晰了,这个函数不仅仅会获取数据,还会开启接收中断,为什么这里要开启?我们再来往前看,我们看一下这个函数:
static HAL_StatusTypeDef UART_Receive_IT(UART_HandleTypeDef *huart)
{
// 中间的省略...
if (--huart->RxXferCount == 0U)
{
/* Disable the UART Data Register not empty Interrupt */
__HAL_UART_DISABLE_IT(huart, UART_IT_RXNE);
// 中间的省略...
/*Call legacy weak Rx complete callback*/
HAL_UART_RxCpltCallback(huart);
// 中间的省略...
}
// 后边的省略...
}额,中间太多没用的占行数,就都删了,大致有这个关系就行了,我们看一下这个的定义 RxXferCount :UART Rx Transfer Counter翻译过来是 UART Rx传输计数器,我们看逻辑大概就是当这个值减到0的时候才会调用回调函数,这样不就联系起来了吗?我们通过 HAL_UART_Receive_IT 设置了串口的这个参数的值,然后每发生一次中断这个数就会自减1,当减到0的时候,调用回调函数,这是对于 HAL_UART_Receive_IT 第三个参数的理解,那么前边说的需要重新开启中断呢?我们看这个函数里,在 RxXferCount 减到0的时候,它先去关闭了接收中断,这样的话,每调用一次回调函数,就会关闭一次中断,我们要是不再开启接收中断的话,下一次接收就不会产生中断啦,这样就理清楚了这个关系了。
【总结】
(1)使用接收中断时,必须在初始化完成后调用一次 HAL_UART_Receive_IT() 函数来开启接收中断(其他地方实际上是没有开启接收中断的,这样才能产生第一次中断)
(2)每次调用回调函数的完成后一定要再调用一次 HAL_UART_Receive_IT() 来重新开启接收中断。
(3)HAL_UART_Receive_IT()只要调用,就会开启接收中断,但是中断多少次之后调用回调函数,由第三个参数决定,当第三个参数为1时,每接收到一个字节数据,都会调用一次回调函数,当不为1时,每接受一个字节都会产生一次中断,但是,接收到对应字节数的数据时才会调用一次回调函数。
5. 运行结果
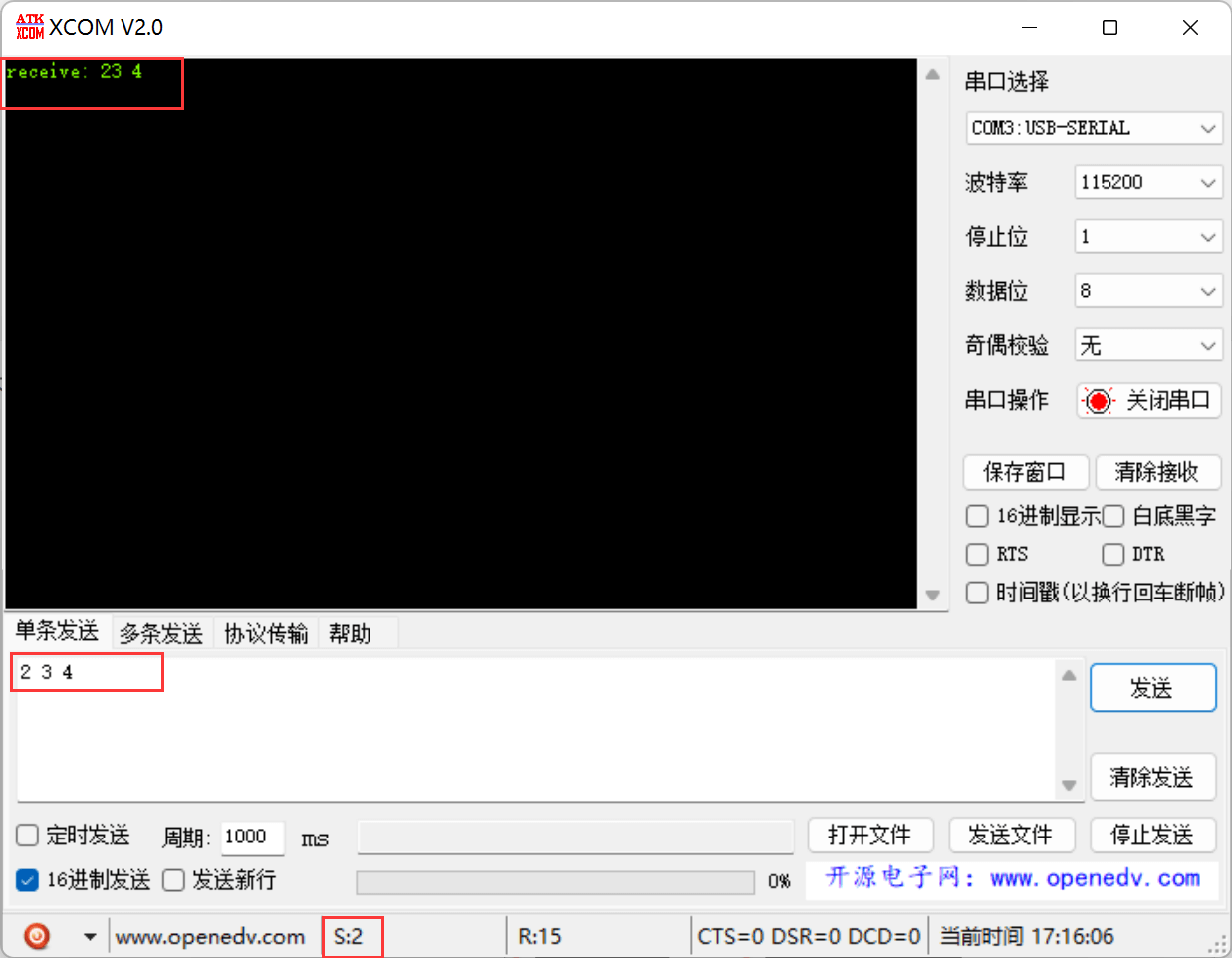
我们将接收的字节数定义为 2,也就是接收到两个字节数据时才产生中断:
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance == USART1)
{
printf("receive: %x %x\r\n", RXBUFF[0], RXBUFF[1]);
HAL_UART_Receive_IT(&huart1, RXBUFF, 2);
}
}接下来我们来看看效果:
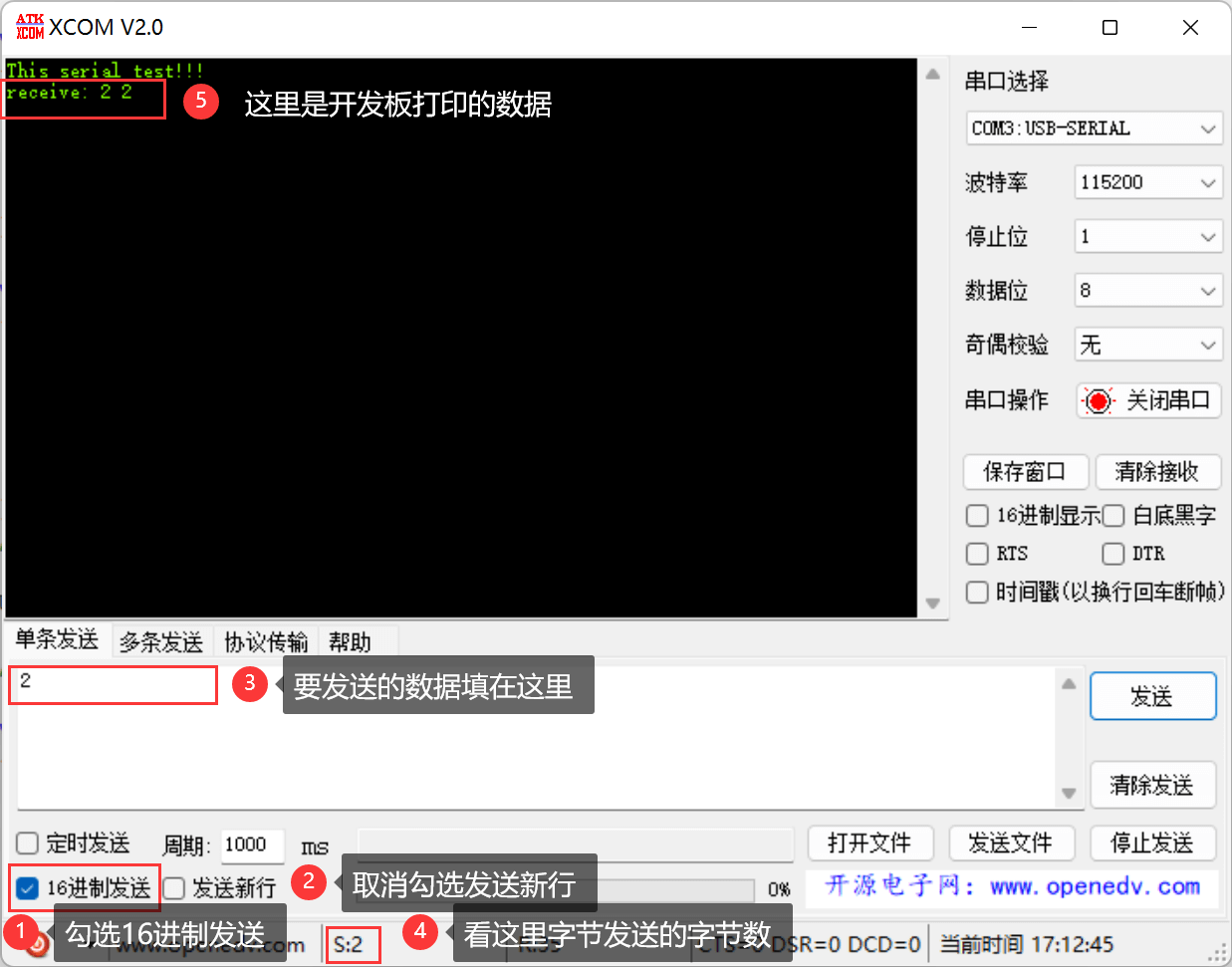
我们发送一个2,会发现没有输出,我们再点一次发送,下方状态栏的S变为2,此时上方显示出我们发送出去的两个2,这也验证了我们之前的分析过程。有一点需要注意,在串口调试助手中,空格可能不被识别的,我们关注下方发送的字节数即可:
三、串口接收设计
1. 相关定义
#define RXBUFFERSIZE 1 // 缓存大小,这个值决定了收到多少个字节数据执行一次回调函数
#define USART_REC_LEN 200 // 定义最大接收字节数 200
uint16_t USART_RX_STA = 0; // 接收状态标记
// bit15 接收完成标志
// bit14 接收到0x0d
// bit13~0 接收到的有效字节数目
uint8_t aRxBuffer[RXBUFFERSIZE]; // HAL库使用的串口接收缓冲
//注意,读取USARTx->SR能避免莫名其妙的错误
uint8_t USART_RX_BUF[USART_REC_LEN]; //接收缓冲,最大USART_REC_LEN个字节.2. 接收中断回调函数
/**
* @brief 串口接收中断回调函数
* @note
* @param huart 串口句柄
* @retval
*/
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
uint32_t timeout = 0;
if (huart->Instance == USART1) // 如果是串口1
{
if ((USART_RX_STA & 0x8000) == 0) // 接收未完成
{
if (USART_RX_STA & 0x4000) // 接收到了0x0d(回车)
{
if (aRxBuffer[0] != 0x0a) // 是否接收到了0x0a(换行)
USART_RX_STA = 0; // 接收错误,重新开始
else
USART_RX_STA |= 0x8000; // 接收完成了
}
else // 还没收到0X0D
{
if (aRxBuffer[0] == 0x0d)
USART_RX_STA |= 0x4000;
else
{
USART_RX_BUF[USART_RX_STA & 0X3FFF] = aRxBuffer[0];
USART_RX_STA++;
if (USART_RX_STA > (USART_REC_LEN - 1))
USART_RX_STA = 0; // 接收数据错误,重新开始接收
}
}
}
timeout = 0;
while (HAL_UART_GetState(&huart1) != HAL_UART_STATE_READY) // 等待就绪
{
timeout++; ////超时处理
if (timeout > HAL_MAX_DELAY)
break;
}
timeout = 0;
// 一次处理完成之后,重新开启中断并设置RxXferCount为1
while (HAL_UART_Receive_IT(&huart1, (uint8_t *)aRxBuffer, RXBUFFERSIZE) != HAL_OK)
{
timeout++; // 超时处理
if (timeout > HAL_MAX_DELAY)
break;
}
}
}【注意】一定要注意回调函数执行完毕后,要重新调用一次HAL_UART_Receive_IT()函数。
四、printf问题总结
前边我们在keil中编程的时候使用的是STM32CubeMX生成的工程,或者说自己使用标准库新建工程,出现重定向printf后无法打印的情况可以使用下边的处理方式1,但是后来我发现,在STM32CubeIDE中创建的工程,使用处理方式一后依然无法打印,后来上网搜了一下,又添加了一些东西,作为参考吧。
1. MDK中无法打印处理
串口是我们经常要用到的,我们可以将fputc一起写到避免半主机模式的代码中,这样,后续我们只需要赋值这一段代码到工程就可以啦:
//加入以下代码,支持printf函数,而不需要选择use MicroLIB
#if 1
#include <stdio.h>
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdin;
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
void _sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while((USART1->SR & (1<<6)) == 0); //等待DR为空//循环发送,直到发送完毕
USART1->DR = (uint8_t) ch;
return ch;
}
#endif2. STM32CubeIDE中无法打印处理
这种方式主要是针对我们在STM32CubeIDE新建的工程中无法使用printf打印的处理,这里多定义了一些东西,其实这样更通用一些,至少这样可以解决问题。
#include "sys.h"
#if 1
#include <stdio.h>
#include "usart.h"
#pragma import(__use_no_semihosting)
#ifdef __GNUC__
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
//STM32cubeIDE下
PUTCHAR_PROTOTYPE
{
HAL_UART_Transmit(&huart1 , (uint8_t *)&ch, 1,0x200);
return ch;
}
// 标准库需要的支持函数
struct __FILE
{
int handle;
};
FILE __stdout;
FILE __stdin;
// 定义_sys_exit()以避免使用半主机模式
void _sys_exit(int x)
{
x = x;
}
// 重定义fputc函数
int fputc(int ch, FILE *f)
{
while((USART1->SR & (1<<6)) == 0);//等待RDR不为空,表示收到数据
USART1->DR = (uint8_t) ch;
return ch;
}
#endif3. Makefile工程无法打印处理
我们使用STM32CubeMX生成的Makefile工程,也是无法使用printf的,但是使用上边的两种方式都不行,makefile使用的交叉编译工具链为
$ arm-none-eabi-gcc -v
Using built-in specs.
COLLECT_GCC=C:\Program Files (x86)\Arm GNU Toolchain arm-none-eabi\12.2 mpacbti-rel1\bin\arm-none-eabi-gcc.exe
COLLECT_LTO_WRAPPER=c:/program\ files\ (x86)/arm\ gnu\ toolchain\ arm-none-eabi/12.2\ mpacbti-rel1/bin/../libexec/gcc/arm-none-eabi/12.2.1/lto-wrapper.exe
Target: arm-none-eabi
Configured with: /data/jenkins/workspace/GNU-toolchain/arm-12-mpacbti/src/gcc/configure --target=arm-none-eabi --prefix=/data/jenkins/workspace/GNU-toolchain/arm-12-mpacbti/build-mingw-arm-none-eabi/install --with-gmp=/data/jenkins/workspace/GNU-toolchain/arm-12-mpacbti/build-mingw-arm-none-eabi/host-tools --with-mpfr=/data/jenkins/workspace/GNU-toolchain/arm-12-mpacbti/build-mingw-arm-none-eabi/host-tools --with-mpc=/data/jenkins/workspace/GNU-toolchain/arm-12-mpacbti/build-mingw-arm-none-eabi/host-tools --with-isl=/data/jenkins/workspace/GNU-toolchain/arm-12-mpacbti/build-mingw-arm-none-eabi/host-tools --disable-shared --disable-nls --disable-threads --disable-tls --enable-checking=release --enable-languages=c,c++,fortran --with-newlib --with-gnu-as --with-gnu-ld --with-sysroot=/data/jenkins/workspace/GNU-toolchain/arm-12-mpacbti/build-mingw-arm-none-eabi/install/arm-none-eabi --with-multilib-list=aprofile,rmprofile --with-libiconv-prefix=/data/jenkins/workspace/GNU-toolchain/arm-12-mpacbti/build-mingw-arm-none-eabi/host-tools --host=i686-w64-mingw32 --with-pkgversion='Arm GNU Toolchain 12.2.MPACBTI-Rel1 (Build arm-12-mpacbti.34)' --with-bugurl=https://bugs.linaro.org/
Thread model: single
Supported LTO compression algorithms: zlib
gcc version 12.2.1 20230214 (Arm GNU Toolchain 12.2.MPACBTI-Rel1 (Build arm-12-mpacbti.34))无法打印的处理方式为:
#include "./sys.h"
//加入以下代码,支持printf函数,而不需要选择use MicroLIB
#ifdef __USART_H__
/**
* @brief 重定义 _write 函数
* @note
* @param fd 文件描述符
* @param ch 要写入的字符串
* @param len 要写入的字符串长度
* @retval len 返回写入字符串的长度
*/
int _write(int fd, char *ch, int len)
{
HAL_UART_Transmit(&huart1, (uint8_t *)ch, len, 0xFFFF);
return len;
}
#endif注意在要保证这个sys.c文件包含的有串口对应的头文件,我这里是因为包含了main.h,在main.h中包含了usart.h头文件。这个比起另外两种倒是简单了不少。