LV205-U-Boot启动内核
一、images 全局变量
不管是 bootz 还是 bootm 命令,在启动 Linux 内核的时候都会用到一个重要的全局变量:images,全局变量 images 会在 bootz 命令的执行中频繁使用到,相当于 Linux 内核启动的“灵魂”。images 变量在文件 cmd/bootm.c 中有如下定义:
bootm_headers_t images; /* pointers to os/initrd/fdt images */images 是 bootm_headers_t 类型的全局变量, bootm_headers_t 是个 boot 头结构体,在文件 include/image.h 中的定义如下(删除了一些条件编译代码):
typedef struct bootm_headers
{
/*
* Legacy os image header, if it is a multi component image
* then boot_get_ramdisk() and get_fdt() will attempt to get
* data from second and third component accordingly.
*/
image_header_t *legacy_hdr_os; /* image header pointer */
image_header_t legacy_hdr_os_copy; /* header copy */
ulong legacy_hdr_valid;
// 中间的省略 ...
#ifndef USE_HOSTCC
image_info_t os; /* OS 镜像信息 */
ulong ep; /* OS 入口点 */
ulong rd_start, rd_end; /* ramdisk 开始和结束位置 */
char *ft_addr; /* 设备树地址 */
ulong ft_len; /* 设备树长度 */
ulong initrd_start; /* initrd 开始位置 */
ulong initrd_end; /* initrd 结束位置 */
ulong cmdline_start; /* cmdline 开始位置 */
ulong cmdline_end; /* cmdline 结束位置 */
bd_t *kbd;
#endif
int verify; /* getenv("verify")[0] != 'n' */
#define BOOTM_STATE_START (0x00000001)
#define BOOTM_STATE_FINDOS (0x00000002)
#define BOOTM_STATE_FINDOTHER (0x00000004)
#define BOOTM_STATE_LOADOS (0x00000008)
#define BOOTM_STATE_RAMDISK (0x00000010)
#define BOOTM_STATE_FDT (0x00000020)
#define BOOTM_STATE_OS_CMDLINE (0x00000040)
#define BOOTM_STATE_OS_BD_T (0x00000080)
#define BOOTM_STATE_OS_PREP (0x00000100)
#define BOOTM_STATE_OS_FAKE_GO (0x00000200)/*'Almost' run the OS*/
#define BOOTM_STATE_OS_GO (0x00000400)
int state;
#ifdef CONFIG_LMB
struct lmb lmb; /* 内存管理相关,不深入研究 */
#endif
} bootm_headers_t;第 15 行(第 335 行): os 成员变量是 image_info_t 类型的,为系统镜像信息。 结构体 image_info_t,也就是系统镜像信息结构体,此结构体在文件 include/image.h 中的定义如下:
typedef struct image_info {
ulong start, end; /* start/end of blob */
ulong image_start, image_len; /* start of image within blob, len of image */
ulong load; /* load addr for the image */
uint8_t comp, type, os; /* compression, type of image, os type */
uint8_t arch; /* CPU architecture */
} image_info_t;第 32 ~ 42 行(第 352 ~ 362 行):这 11 个宏定义表示 BOOT 的不同阶段。
二、do_bootz 函数
前边我们分析 uboot 启动流程的时候有分析过,每一个命令最后执行的都是命令对应的 do_xxx 函数。
1. do_bootz 在哪?
该函数在 cmd/bootm.c文件中定义。
2. 做了什么?
我们以下边的行号进行分析:
int do_bootz(cmd_tbl_t *cmdtp, int flag, int argc, char * const argv[])
{
int ret;
/* Consume 'bootz' */
argc--; argv++;
if (bootz_start(cmdtp, flag, argc, argv, &images))
return 1;
/*
* We are doing the BOOTM_STATE_LOADOS state ourselves, so must
* disable interrupts ourselves
*/
bootm_disable_interrupts();
images.os.os = IH_OS_LINUX;
ret = do_bootm_states(cmdtp, flag, argc, argv,
BOOTM_STATE_OS_PREP | BOOTM_STATE_OS_FAKE_GO |
BOOTM_STATE_OS_GO,
&images, 1);
return ret;
}第 8 行(第 629 行):调用 bootz_start 函数, bootz_start 函数执行过程后边会再详细分析。
第 15 行(第 636 行):调用函数 bootm_disable_interrupts 关闭中断。
第 17 行(第 638 行):设置 images.os.os 为 IH_OS_LINUX,也就是设置系统镜像为 Linux,表示我们要启动的是 Linux 系统!后面会用到 images.os.os 来挑选具体的启动函数。
第 18 行(第 639 行):调用函数 do_bootm_states 来执行不同的 BOOT 阶段,这里要执行的 BOOT 阶段有:BOOTM_STATE_OS_PREP 、BOOTM_STATE_OS_FAKE_GO 和 BOOTM_STATE_OS_GO。
三、bootz_start 函数
bootz_start 主要用于初始化 images 的相关成员变量。
1. bootz_start 函数在哪?
bootz_start 函数也定义在文 cmd/bootm.c中,函数内容如下:
2. 做了什么?
我们以下边的行号进行分析:
static int bootz_start(cmd_tbl_t *cmdtp, int flag, int argc,
char * const argv[], bootm_headers_t *images)
{
int ret;
ulong zi_start, zi_end;
ret = do_bootm_states(cmdtp, flag, argc, argv, BOOTM_STATE_START,
images, 1);
/* Setup Linux kernel zImage entry point */
if (!argc) {
images->ep = load_addr;
debug("* kernel: default image load address = 0x%08lx\n",
load_addr);
} else {
images->ep = simple_strtoul(argv[0], NULL, 16);
debug("* kernel: cmdline image address = 0x%08lx\n",
images->ep);
}
ret = bootz_setup(images->ep, &zi_start, &zi_end);
if (ret != 0)
return 1;
lmb_reserve(&images->lmb, images->ep, zi_end - zi_start);
/*
* Handle the BOOTM_STATE_FINDOTHER state ourselves as we do not
* have a header that provide this informaiton.
*/
if (bootm_find_images(flag, argc, argv))
return 1;
#ifdef CONFIG_SECURE_BOOT
extern uint32_t authenticate_image(
uint32_t ddr_start, uint32_t image_size);
if (authenticate_image(images->ep, zi_end - zi_start) == 0) {
printf("Authenticate zImage Fail, Please check\n");
return 1;
}
#endif
return 0;
}第 7 行(第 584 行):调用函数 do_bootm_states,执行 BOOTM_STATE_START 阶段。
第 16 行(第 593 行):设置 images 的 ep 成员变量,也就是系统镜像的入口点,使用 bootz 命令启动系统的时候就会设置系统在 DRAM 中的存储位置,这个存储位置就是系统镜像的入口点,因此 images-> ep = 0X80800000。
第 21 行(第 598 行)调用 bootz_setup 函数,此函数会判断当前的系统镜像文件是否为 Linux 的镜像文件,并且会打印出镜像相关信息, 这个函数后边会再详细说明。
第 31 行(第 608 行):调用函数 bootm_find_images 查找 ramdisk 和设备树(dtb)文件,但是我们没有用到 ramdisk,因此此函数在这里仅仅用于查找设备树(dtb)文件,此函数后边会详细说明。
3. bootz_setup 函数
bootz_setup 函数,此函数定义在文件 arch/arm/lib/bootm.c 中,函数内容如下:
#define LINUX_ARM_ZIMAGE_MAGIC 0x016f2818
int bootz_setup(ulong image, ulong *start, ulong *end)
{
struct zimage_header *zi;
zi = (struct zimage_header *)map_sysmem(image, 0);
if (zi->zi_magic != LINUX_ARM_ZIMAGE_MAGIC) {
puts("Bad Linux ARM zImage magic!\n");
return 1;
}
*start = zi->zi_start;
*end = zi->zi_end;
printf("Kernel image @ %#08lx [ %#08lx - %#08lx ]\n", image, *start,
*end);
return 0;
}第 1 行(第 370 行):宏 LINUX_ARM_ZIMAGE_MAGIC 就是 ARM Linux 系统魔术数。
第 7 行(第 376 行):从传递进来的参数 image(也就是系统镜像首地址)中获取 zimage 头。 zImage 头结构体为 zimage_header。
第 8 ~ 11 行(第 377 ~ 380 行):判断 image 是否为 ARM 的 Linux 系统镜像,如果不是的话就直接返回,并且打印出“Bad Linux ARM zImage magic!”。
第 13、14 行(第 382、 383 行):初始化函数 bootz_setup 的参数 start 和 end。
第 16 行(第 385 行)打印启动信息,如果 Linux 系统镜像正常的话就会输出下图所示的信息:

4. bootm_find_images 函数
bootm_find_images 函数,此函数定义在文件 common/bootm.c 中 ,函数内容如下:
/**
* bootm_find_images - wrapper to find and locate various images
* @flag: Ignored Argument
* @argc: command argument count
* @argv: command argument list
*
* boot_find_images() will attempt to load an available ramdisk,
* flattened device tree, as well as specifically marked
* "loadable" images (loadables are FIT only)
*
* Note: bootm_find_images will skip an image if it is not found
*
* @return:
* 0, if all existing images were loaded correctly
* 1, if an image is found but corrupted, or invalid
*/
int bootm_find_images(int flag, int argc, char * const argv[])
{
int ret;
/* find ramdisk */
ret = boot_get_ramdisk(argc, argv, &images, IH_INITRD_ARCH,
&images.rd_start, &images.rd_end);
if (ret) {
puts("Ramdisk image is corrupt or invalid\n");
return 1;
}
#if defined(CONFIG_OF_LIBFDT)
/* find flattened device tree */
ret = boot_get_fdt(flag, argc, argv, IH_ARCH_DEFAULT, &images,
&images.ft_addr, &images.ft_len);
if (ret) {
puts("Could not find a valid device tree\n");
return 1;
}
set_working_fdt_addr((ulong)images.ft_addr);
#endif
#if defined(CONFIG_FIT)
/* find all of the loadables */
ret = boot_get_loadable(argc, argv, &images, IH_ARCH_DEFAULT,
NULL, NULL);
if (ret) {
printf("Loadable(s) is corrupt or invalid\n");
return 1;
}
#endif
return 0;
}第 21 ~ 27 行(第 230~235 行):查找 ramdisk,但是我们没有用到 ramdisk,因此这部分代码就不用关心了。
第 29 ~ 36 行(第 237~244 行):查找设备树(dtb)文件,找到以后就将设备树的起始地址和长度分别写到 images 的 ft_addr 和 ft_len 成员变量中。我们使用 bootz 启动 Linux 的时候已经指明了设备树在 DRAM 中的存储地址,因此 images.ft_addr = 0X83000000,长度根据具体的设备树文件而定,比如我现在使用的设备树文件长度为 0X8C81 的话,images.ft_len 就为 0X8C81。
三、do_bootm_states 函数
do_bootz 最后调用的就是函数 do_bootm_states ,而且在 bootz_start 中也调用了 do_bootm_states 函数。
1. do_bootm_states 函数在哪?
do_bootm_states 函数定义在 common/bootm.c 中。
2. 做了什么?
函数 do_bootm_states 根据不同的 BOOT 状态执行不同的代码段,通过如下代码来判断 BOOT 状态:
states & BOOTM_STATE_XXX在 do_bootz 函数中会用到 BOOTM_STATE_OS_PREP 、BOOTM_STATE_OS_FAKE_GO 和 BOOTM_STATE_OS_GO 这三个 BOOT 状态,bootz_start 函数中会用到 BOOTM_STATE_START 这个 BOOT 状态。为了精简代码,方便分析,因此我们将上边的函数 do_bootm_states 进行精简,只留下下面这 4 个 BOOT 状态对应的处理代码:
int do_bootm_states(cmd_tbl_t *cmdtp, int flag, int argc, char *
const argv[],
int states, bootm_headers_t *images, int boot_progress)
{
boot_os_fn *boot_fn;
ulong iflag = 0;
int ret = 0, need_boot_fn;
images->state |= states;
/*
* Work through the states and see how far we get. We stop on
* any error.
*/
if (states & BOOTM_STATE_START)
ret = bootm_start(cmdtp, flag, argc, argv);
// 中间部分省略 ......
/* From now on, we need the OS boot function */
if (ret)
return ret;
boot_fn = bootm_os_get_boot_func(images->os.os);
need_boot_fn = states & (BOOTM_STATE_OS_CMDLINE |
BOOTM_STATE_OS_BD_T | BOOTM_STATE_OS_PREP |
BOOTM_STATE_OS_FAKE_GO | BOOTM_STATE_OS_GO);
if (boot_fn == NULL && need_boot_fn)
{
if (iflag)
enable_interrupts();
printf("ERROR: booting os '%s' (%d) is not supported\n",
genimg_get_os_name(images->os.os), images->os.os);
bootstage_error(BOOTSTAGE_ID_CHECK_BOOT_OS);
return 1;
}
// 中间部分省略 ......
if (!ret && (states & BOOTM_STATE_OS_PREP))
ret = boot_fn(BOOTM_STATE_OS_PREP, argc, argv, images);
#ifdef CONFIG_TRACE
/* Pretend to run the OS, then run a user command */
if (!ret && (states & BOOTM_STATE_OS_FAKE_GO))
{
char *cmd_list = getenv("fakegocmd");
ret = boot_selected_os(argc, argv, BOOTM_STATE_OS_FAKE_GO,
images, boot_fn);
if (!ret && cmd_list)
ret = run_command_list(cmd_list, -1, flag);
}
#endif
/* Check for unsupported subcommand. */
if (ret)
{
puts("subcommand not supported\n");
return ret;
}
/* Now run the OS! We hope this doesn't return */
if (!ret && (states & BOOTM_STATE_OS_GO))
ret = boot_selected_os(argc, argv, BOOTM_STATE_OS_GO,
images, boot_fn);
// 中间部分省略 ......
return ret;
}第 15、16 行(第 604、 605 行):处理 BOOTM_STATE_START 阶段, bootz_start 会执行这一段代码,这里调用函数 bootm_start。函数定义在文件 common/bootm.c 中,函数内容如下:
static int bootm_start(cmd_tbl_t *cmdtp, int flag, int argc,
char * const argv[])
{
memset((void *)&images, 0, sizeof(images));
images.verify = getenv_yesno("verify");
boot_start_lmb(&images);
bootstage_mark_name(BOOTSTAGE_ID_BOOTM_START, "bootm_start");
images.state = BOOTM_STATE_START;
return 0;
}第 22 行(第 658 行):通过函数 bootm_os_get_boot_func 来查找系统启动函数,参数 images-> os.os 就是系统类型,根据这个系统类型来选择对应的启动函数,在 do_bootz 中设置 images.os.os = IH_OS_LINUX。函数返回值就是找到的系统启动函数,这里找到的 Linux 系统启动函数为 do_bootm_linux,关于此函数查找系统启动函数的过程后边会再单独分析(第四节)。因此 boot_fn = do_bootm_linux ,后面执行 boot_fn 函数的地方实际上是执行的 do_bootm_linux 函数。
第 37 行(第 676 行):处理 BOOTM_STATE_OS_PREP 状态,调用函数 do_bootm_linux, do_bootm_linux 也是调用 boot_prep_linux 来完成具体的处理过程。 boot_prep_linux 主要用于处理环境变量 bootargs, bootargs 保存着传递给 Linux kernel 的参数。
第 40 ~ 51 行(第 679 ~ 689 行):是处理 BOOTM_STATE_OS_FAKE_GO 状态的,但是要我们没有使能 TRACE 功能,因此 CONFIG_TRACE 也就没有定义,所以这段程序不会编译。
第 62 行(第 699 行):调用函数 boot_selected_os 启动 Linux 内核,此函数第 4 个参数为 Linux 系统镜像头,第 5 个参数就是 Linux 系统启动函数 do_bootm_linux。boot_selected_os 函数定义在文件 common/bootm_os.c 中,函数内容如下:
int boot_selected_os(int argc, char * const argv[], int state,
bootm_headers_t *images, boot_os_fn *boot_fn)
{
arch_preboot_os();
boot_fn(state, argc, argv, images); // 调用 boot_fn 函数,也就是 do_bootm_linux 函数来启动 Linux 内核。
/* Stand-alone may return when 'autostart' is 'no' */
if (images->os.type == IH_TYPE_STANDALONE ||
state == BOOTM_STATE_OS_FAKE_GO) /* We expect to return */
return 0;
bootstage_error(BOOTSTAGE_ID_BOOT_OS_RETURNED);
#ifdef DEBUG
puts("\n## Control returned to monitor - resetting...\n");
#endif
return BOOTM_ERR_RESET;
}四、bootm_os_get_boot_func 函数
do_bootm_states 会调用 bootm_os_get_boot_func 来查找对应系统的启动函数 。
1. bootm_os_get_boot_func 函数在哪?
bootm_os_get_boot_func 函数定义在文件 common/bootm_os.c 中。
2. 做了什么
我们使用下边的行号进行分析:
boot_os_fn *bootm_os_get_boot_func(int os)
{
#ifdef CONFIG_NEEDS_MANUAL_RELOC
static bool relocated;
if (!relocated) {
int i;
/* relocate boot function table */
for (i = 0; i < ARRAY_SIZE(boot_os); i++)
if (boot_os[i] != NULL)
boot_os[i] += gd->reloc_off;
relocated = true;
}
#endif
return boot_os[os];
}第 3 ~ 16 行(第 495~508 行):条件编译,在我们使用的这个 uboot 中没有用到,因此这段代码无效。
第 17 行(第 509 行):boot_os 是个数组,这个数组里面存放着不同的系统对应的启动函数。boot_os 定义在文件 common/bootm_os.c 中,如下所示:
static boot_os_fn *boot_os[] = {
[IH_OS_U_BOOT] = do_bootm_standalone,
#ifdef CONFIG_BOOTM_LINUX
[IH_OS_LINUX] = do_bootm_linux, // 是 Linux 系统对应的启动函数 do_bootm_linux 。
#endif
//...
};五、do_bootm_linux 函数
1. do_bootm_linux 函数在哪?
do_bootm_linux 就是最终启动 Linux 内核的函数,此函数定义在文件 arch/arm/lib/bootm.c,函数内容如下:
2. 做了什么?
我们以下边的行号进行分析:
int do_bootm_linux(int flag, int argc, char * const argv[],
bootm_headers_t *images)
{
/* No need for those on ARM */
if (flag & BOOTM_STATE_OS_BD_T || flag & BOOTM_STATE_OS_CMDLINE)
return -1;
if (flag & BOOTM_STATE_OS_PREP) {
boot_prep_linux(images);
return 0;
}
if (flag & (BOOTM_STATE_OS_GO | BOOTM_STATE_OS_FAKE_GO)) {
boot_jump_linux(images, flag);
return 0;
}
boot_prep_linux(images);
boot_jump_linux(images, flag);
return 0;
}第 13 行(第 351 行):如果参数 flag 等于 BOOTM_STATE_OS_GO 或者 BOOTM_STATE_OS_FAKE_GO 的话就执行 boot_jump_linux 函数。 boot_selected_os 函数在调用 do_bootm_linux 的时候会将 flag 设置为 BOOTM_STATE_OS_GO。
第 14 行(第 352 行):执行函数 boot_jump_linux,这个函数可以看下一小节。
3. boot_jump_linux
此函数定义在文件 arch/arm/lib/bootm.c 中,函数内容如下:
static void boot_jump_linux(bootm_headers_t *images, int flag)
{
#ifdef CONFIG_ARM64
void (*kernel_entry)(void *fdt_addr, void *res0, void *res1,
void *res2);
int fake = (flag & BOOTM_STATE_OS_FAKE_GO);
kernel_entry = (void (*)(void *fdt_addr, void *res0, void *res1,
void *res2))images->ep;
debug("## Transferring control to Linux (at address %lx)...\n",
(ulong) kernel_entry);
bootstage_mark(BOOTSTAGE_ID_RUN_OS);
announce_and_cleanup(fake);
if (!fake) {
do_nonsec_virt_switch();
kernel_entry(images->ft_addr, NULL, NULL, NULL);
}
#else
unsigned long machid = gd->bd->bi_arch_number;
char *s;
void (*kernel_entry)(int zero, int arch, uint params);
unsigned long r2;
int fake = (flag & BOOTM_STATE_OS_FAKE_GO);
kernel_entry = (void (*)(int, int, uint))images->ep;
s = getenv("machid");
if (s) {
if (strict_strtoul(s, 16, &machid) < 0) {
debug("strict_strtoul failed!\n");
return;
}
printf("Using machid 0x%lx from environment\n", machid);
}
debug("## Transferring control to Linux (at address %08lx)" \
"...\n", (ulong) kernel_entry);
bootstage_mark(BOOTSTAGE_ID_RUN_OS);
announce_and_cleanup(fake);
if (IMAGE_ENABLE_OF_LIBFDT && images->ft_len)
r2 = (unsigned long)images->ft_addr;
else
r2 = gd->bd->bi_boot_params;
if (!fake) {
#ifdef CONFIG_ARMV7_NONSEC
if (armv7_boot_nonsec()) {
armv7_init_nonsec();
secure_ram_addr(_do_nonsec_entry)(kernel_entry,
0, machid, r2);
} else
#endif
kernel_entry(0, machid, r2);
}
#endif
}第 3 ~ 21 行(第 274~292 行):是 64 位 ARM 芯片对应的代码, Cortex-A7 是 32 位芯片,因此用不到。
第 22 行(第 293 行):变量 machid 保存机器 ID,如果不使用设备树的话这个机器 ID 会被传递给 Linux 内核, Linux 内核会在自己的机器 ID 列表里面查找是否存在与 uboot 传递进来的 machid 匹配的项目,如果存在就说明 Linux 内核支持这个机器,那么 Linux 就会启动!如果使用设备树的话这个 machid 就无效了,设备树存有一个“兼容性”这个属性, Linux 内核会比较“兼容性”属性的值(字符串)来查看是否支持这个机器。】、
第 24 行(第 295 行)函数 kernel_entry,看名字“内核_进入”,说明此函数是进入 Linux 内核的,也就是最终的启动内核函数。此函数有三个参数: zero, arch, params,第一个参数 zero 同样为 0;第二个参数为机器 ID; 第三个参数 ATAGS 或者设备树(DTB)首地址,ATAGS 是传统的方法,用于传递一些命令行信息,如果使用设备树的话就要传递设备树(DTB)。
第 28 行(第 299 行):获取 kernel_entry 函数,函数 kernel_entry 并不是 uboot 定义的,而是 Linux 内核定义的, Linux 内核镜像文件的第一行代码就是函数 kernel_entry,而 images-> ep 保存着 Linux 内核镜像的起始地址,起始地址保存的正是 Linux 内核第一行代码。
第 42 行(第 313 行):调用函数 announce_and_cleanup 来打印一些信息并做一些清理工作。此函数定义在文件 arch/arm/lib/bootm.c 中,函数内容如下:
static void announce_and_cleanup(int fake)
{
printf("\nStarting kernel ...%s\n\n", fake ?
"(fake run for tracing)" : "");
bootstage_mark_name(BOOTSTAGE_ID_BOOTM_HANDOFF, "start_kernel");
#ifdef CONFIG_BOOTSTAGE_FDT
bootstage_fdt_add_report();
#endif
#ifdef CONFIG_BOOTSTAGE_REPORT
bootstage_report();
#endif
#ifdef CONFIG_USB_DEVICE
udc_disconnect();
#endif
cleanup_before_linux(); // 调用 cleanup_before_linux 函数做一些清理工作。
}该函数在启动 Linux 之前输出“Starting kernel ...”信息 。

第 44 ~ 47 行(第 315 ~ 318 行):是设置寄存器 r2 的值,Linux 内核一开始是汇编代码,因此函数 kernel_entry 就是个汇编函数。向汇编函数传递参数要使用 r0、 r1 和 r2(参数数量不超过 3 个的时候),所以 r2 寄存器就是函数 kernel_entry 的第三个参数。
第 45 行(第 316 行):如果使用设备树的话, r2 应该是设备树的起始地址,而设备树地址保存在 images 的 ftd_addr 成员变量中。
第 46 行(第 317 行):如果不使用设备树的话, r2 应该是 uboot 传递给 Linux 的参数起始地址,也就是环境变量 bootargs 的值。
第 57 行(第 328 行):调用 kernel_entry 函数进入 Linux 内核, uboot 的使命也就完成了。
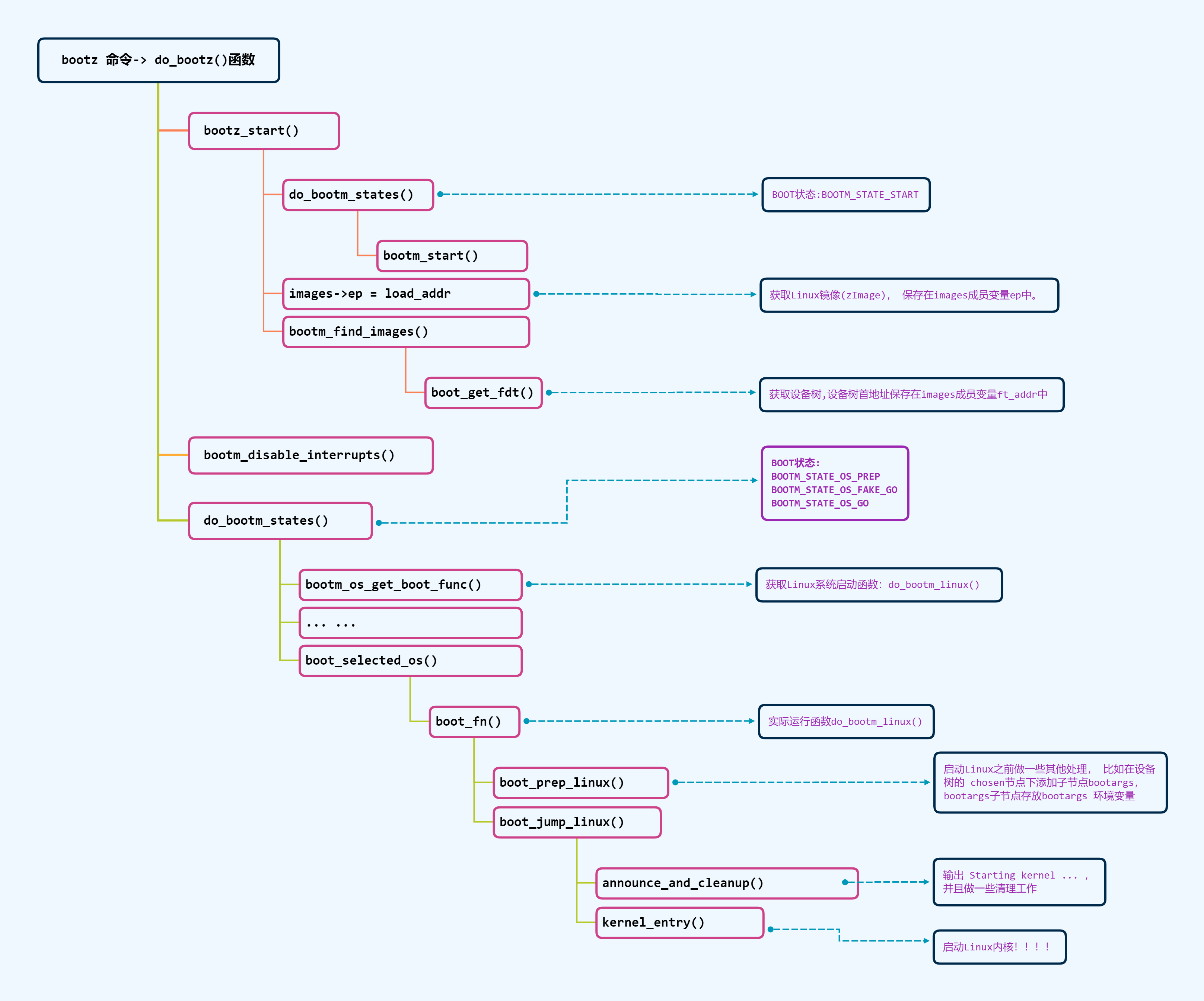
六、bootz 命令总结