
LV215-U-Boot命令处理
我们进入 uboot 界面后敲命令就可以执行,我们从敲命令到按下 enter 键到执行是怎样的一个过程?uboot 怎么识别到我们敲了什么命令,怎么执行的?这一节就来探讨一下吧。
注意:本篇笔记从链接文件开始分析,但是不会详细分析,前面已经专门学习了 uboot 的启动流程,已经详细分析了 uboot 是怎么启动起来的。这里我们的目的是找到 uboot 的命令是怎么初始化的,怎么执行的。重点在于命令。
一、主循环在哪
我们知道 uboot 是一个大型的裸机程序,它不会说像 linux 系统一样有多个进程多个线程再执行,它只有一个进程,就是它自己。既然我们的程序能一直运行,那必然内部有一个循环在处理,这个大概推测一下就知道在循环中执行的肯定是 uboot 命令的解析和执行相关的部分,那么主循环在哪里?这一部分我们先来找一找主循环在哪里。
1. 寻找主循环函数
1.1 main 函数在哪?
正常来说,我们看到一个程序一定是找 main 函数,因为在做裸机开发、应用开发的时候,我们主函数都是这样的:
int main(int argc, char * argv[]);那我们就按照这个思路来分析一下,一步一步找一下这个函数,看看它究竟在哪里。
1.1.1 u-boot.lds
我们知道 uboot 是一个大型的裸机程序,那么它一定有一个 main 函数,其实不管是不是裸机程序,都是有一个 main 函数的。这个 main 函数在哪?程序的链接是由链接脚本来决定的,所以通过链接脚本可以找到程序的入口。如果没有编译过 uboot 的话链接脚本为 u-boot.lds - arch/arm/cpu/u-boot.lds。但是这个不是最终使用的链接脚本,最终的链接脚本是在这个链接脚本的基础上生成的。 我们编译完 uboot 就会在 uboot 源码目录下生成一个 u-boot.lds,我们打开看一下:
OUTPUT_FORMAT("elf32-littlearm", "elf32-littlearm", "elf32-littlearm")
OUTPUT_ARCH(arm)
ENTRY(_start)
SECTIONS
{
. = 0x00000000;
. = ALIGN(4);
.text :
{
*(.__image_copy_start)
*(.vectors)
arch/arm/cpu/armv7/start.o (.text*)
}
}说明: ENTRY(SYMBOL):将符号 SYMBOL 的值设置为入口地址,入口地址是进程执行的第一条指令在进程地址空间的地址(比如 ENTRY(Reset_Handler) 表示进程最开始从复位中断服务函数处执行)
在第三行中,有一个_start 符号,这里就是代码的入口点,这个时候我们去源码里面搜的话,会有一堆,很多文件里都有。我们继续看往下看链接文件,
SECTIONS定义了段,包括text文本段、data数据段、bss段等。__image_copy_start在 System.map 和 u-boot.map 中均有定义,它是.text 段的起始地址,我们可以搜索一下,就会发现它在 System.map 和 u-boot.map 中的值为 0x87800000, 也就是链接地址。*(.vectors)包含所有.vectors段的内容,这通常用于存放中断向量等。arch/arm/cpu/armv7/start.o对应文件arch/arm/cpu/armv7/start.S,该文件中定义了main函数的入口。
1.1.2 vectors.S
接下来我们先找中断向量表,因为前面学习裸机开发的时候我们程序一开始就是要设置异常向量表,那么中断向量表定义在哪个文件?我们用 grep 命令搜索一下 .vectors 这个关键词,这样搜索出来还是一堆文件,哪一个是我们要的?首先,它一定是一个汇编文件,其次,它一定含有入口点_start 并且包含一些中断向量表的定义。我们就可以定位到这个 vectors.S - arch/arm/lib/vectors.S 文件,下面的我精简了一下:
.macro ARM_VECTORS
#ifdef CONFIG_ARCH_K3
ldr pc, _reset
#else
b reset
#endif
ldr pc, _undefined_instruction
ldr pc, _software_interrupt
ldr pc, _prefetch_abort
ldr pc, _data_abort
ldr pc, _not_used
ldr pc, _irq
ldr pc, _fiq
.endm
.globl _start
.section ".vectors", "ax"
/* ...... */
_start:
#ifdef CONFIG_SYS_DV_NOR_BOOT_CFG
.word CONFIG_SYS_DV_NOR_BOOT_CFG
#endif
ARM_VECTORS
#endif /* !defined(CONFIG_ENABLE_ARM_SOC_BOOT0_HOOK) */可以看到这里就是定义了中断向量表,并且一开始会跳转到 reset 中执行。reset 函数在哪?我们继续分析。
1.1.3 start.S
reset 这个符号并没有定义在 vectors.S - arch/arm/lib/vectors.S 文件中,它定义在哪?从 u-boot.lds 中推测一下,它里面有这么一行:
arch/arm/cpu/armv7/start.o (.text*)多少肯定有点关系,这个 start.o 对应的文件应该就是 start.S - arch/arm/cpu/armv7/start.S,我们打开这个文件看一下
/* ... ... */
.globl reset
.globl save_boot_params_ret
.type save_boot_params_ret,%function
/* ... ... */
bl _main
/* ... ... */
ENTRY(c_runtime_cpu_setup)
/* ... ... */
ENDPROC(c_runtime_cpu_setup)
/* ... ... */会发现猜想是对的,reset 符号就在这里,这里会调用一些初始化函数,例如 lowlevel_init,这里我们暂时不关心,这里我们要做的是找到主循环所在的地方。简单看一下代码可以看到,到最后是跳转到_main 函数执行了。
1.1.4 crt0.S
我们搜一下这个_main 的符号在哪,会找到这个文件 crt0.S - arch/arm/lib/crt0.S:
ENTRY(_main)
/* ...... */
bic r0, r0, #7 /* 8-byte alignment for ABI compliance */
mov sp, r0
bl board_init_f_alloc_reserve
mov sp, r0
/* set up gd here, outside any C code */
mov r9, r0
bl board_init_f_init_reserve
mov r0, #0
bl board_init_f
/* ...... */
/* call board_init_r(gd_t *id, ulong dest_addr) */
mov r0, r9 /* gd_t */
ldr r1, [r9, #GD_RELOCADDR] /* dest_addr */
/* call board_init_r */
#if CONFIG_IS_ENABLED(SYS_THUMB_BUILD)
ldr lr, =board_init_r /* this is auto-relocated! */
bx lr
#else
ldr pc, =board_init_r /* this is auto-relocated! */
#endif
/* we should not return here. */
#endif
ENDPROC(_main)我们暂时不关心其他的函数,这里有两个函数值得我们关注
- board_init_f 函数主要有两个工作
(1)初始化一系列外设,比如串口、定时器,或者打印一些消息等。
(2)初始化 gd 的各个成员变量,uboot 会将自己重定位到 DRAM 最后面的地址区域,也就 是将自己拷贝到 DRAM 最后面的内存区域中。
- board_init_r
board_init_f 并没有初始化所有的外设,还需要做一些后续工作,这 些后续工作就是由函数 board_init_r 来完成的。后面继续分析就会知道我们要找的命令的初始化以及调用相关的东西都在这个函数中。
1.2 board_init_r()
这个函数定义在哪?其实搜索一下,大概可以判断的出来,或者加点打印信息确认就可以知道这个函数定义在 board_r.c - common/board_r.c 中:
void board_init_r(gd_t *new_gd, ulong dest_addr)
{
/*
* Set up the new global data pointer. So far only x86 does this
* here.
* TODO(sjg@chromium.org): Consider doing this for all archs, or
* dropping the new_gd parameter.
*/
#if CONFIG_IS_ENABLED(X86_64)
arch_setup_gd(new_gd);
#endif
#ifdef CONFIG_NEEDS_MANUAL_RELOC
int i;
#endif
#if !defined(CONFIG_X86) && !defined(CONFIG_ARM) && !defined(CONFIG_ARM64)
gd = new_gd;
#endif
gd->flags &= ~GD_FLG_LOG_READY;
#ifdef CONFIG_NEEDS_MANUAL_RELOC
for (i = 0; i < ARRAY_SIZE(init_sequence_r); i++)
init_sequence_r[i] += gd->reloc_off;
#endif
if (initcall_run_list(init_sequence_r))
hang();
/* NOTREACHED - run_main_loop() does not return */
hang();
}这里面也没几行代码,我们直接看重点 initcall_run_list。可以看一下最后一行的注释,就会发现,这个函数最终会一直运行在 run_main_loop()函数中,不会再返回,也就是说这里就是最终一直死循环处理命令的函数了。
1.3 initcall_run_list()
这个函数定义在 initcall.h - include/initcall.h :
static inline int initcall_run_list(const init_fnc_t init_sequence[])
{
const init_fnc_t *init_fnc_ptr;
for (init_fnc_ptr = init_sequence; *init_fnc_ptr; ++init_fnc_ptr) {
unsigned long reloc_ofs = 0;
int ret;
if (gd->flags & GD_FLG_RELOC)
reloc_ofs = gd->reloc_off;
#ifdef CONFIG_EFI_APP
reloc_ofs = (unsigned long)image_base;
#endif
debug("initcall: %p", (char *)*init_fnc_ptr - reloc_ofs);
if (gd->flags & GD_FLG_RELOC)
debug(" (relocated to %p)\n", (char *)*init_fnc_ptr);
else
debug("\n");
ret = (*init_fnc_ptr)();
if (ret) {
printf("initcall sequence %p failed at call %p (err=%d)\n",
init_sequence,
(char *)*init_fnc_ptr - reloc_ofs, ret);
return -1;
}
}
return 0;
}简化一下:
static inline int initcall_run_list(const init_fnc_t init_sequence[])
{
const init_fnc_t *init_fnc_ptr;
for (init_fnc_ptr = init_sequence; *init_fnc_ptr; ++init_fnc_ptr) {
/* ...... */
ret = (*init_fnc_ptr)();
if (ret) {
printf("initcall sequence %p failed at call %p (err=%d)\n",
init_sequence,
(char *)*init_fnc_ptr - reloc_ofs, ret);
return -1;
}
}
return 0;
}先看一下 init_fnc_t 这个类型,它同样定义在 initcall.h - include/initcall.h:
typedef int (*init_fnc_t)(void);可以看到这是一个指向没有形参且返回值为 int 类型的函数的函数指针,所以上面的代码大概分析一下就是:
(1)定义了一个函数指针 init_fnc_ptr,指向一个名为 init_sequence 的数组,这个数组里面每一个成员都是函数指针。
(2)便利函数指针数组 init_sequence,然后执行。这个 init_sequence 是谁?我们看上一级调用就知道这个传入的参数是 init_sequence_r。
1.4 init_sequence_r
init_sequence_r 是一个函数指针数组,它定义在 board_r.c - common/board_r.c:
static init_fnc_t init_sequence_r[] = {
/* ...... */
run_main_loop,
};其他的我们都先不看其他的,那些都是一些初始化,命令的初始化以及执行这些都在最后的 run_main_loop 函数中。
2. run_main_loop()
上面我们已经找到了这个函数被调用的地方,它定义在 board_r.c - common/board_r.c:
static int run_main_loop(void)
{
#ifdef CONFIG_SANDBOX
sandbox_main_loop_init();
#endif
/* main_loop() can return to retry autoboot, if so just run it again */
for (;;)
main_loop();
return 0;
}可以看到这里面是一个死循环了,一直在执行 main_loop 函数。所以,这里其实就是我们要找的主循环函数。
3. main_loop
我们再来看一下 main_loop 这个函数,它定义在 main.c - common/main.c 中:
/* We come here after U-Boot is initialised and ready to process commands */
void main_loop(void)
{
const char *s;
bootstage_mark_name(BOOTSTAGE_ID_MAIN_LOOP, "main_loop");
if (IS_ENABLED(CONFIG_VERSION_VARIABLE))
env_set("ver", version_string); /* set version variable */
cli_init();
run_preboot_environment_command();
if (IS_ENABLED(CONFIG_UPDATE_TFTP))
update_tftp(0UL, NULL, NULL);
s = bootdelay_process();
if (cli_process_fdt(&s))
cli_secure_boot_cmd(s);
autoboot_command(s);
cli_loop();
panic("No CLI available");
}4. 总结一下
到这里我们就找到了主循环所在的函数,调用关系大概就是:
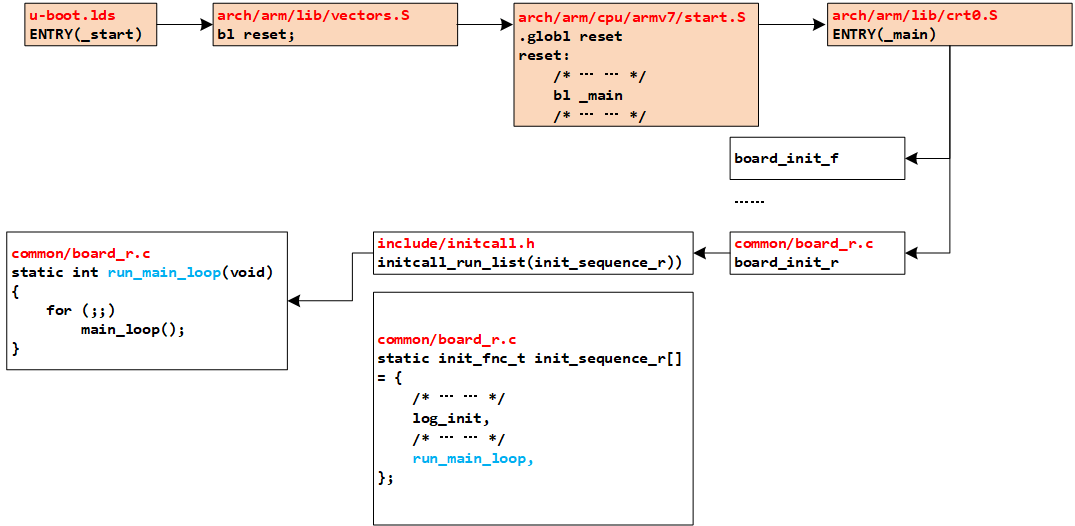
最后调用的 main_loop()就是最后主循环的函数。
二、main_loop 在做什么?
这里只分析命令相关的东西,其他的就暂时先不管。
1. main_loop()
main_loop 函数定义在 main.c - common/main.c:
/* We come here after U-Boot is initialised and ready to process commands */
void main_loop(void)
{
const char *s;
bootstage_mark_name(BOOTSTAGE_ID_MAIN_LOOP, "main_loop");
if (IS_ENABLED(CONFIG_VERSION_VARIABLE))
env_set("ver", version_string); /* set version variable */
cli_init();
run_preboot_environment_command();
if (IS_ENABLED(CONFIG_UPDATE_TFTP))
update_tftp(0UL, NULL, NULL);
s = bootdelay_process();
if (cli_process_fdt(&s))
cli_secure_boot_cmd(s);
autoboot_command(s);
cli_loop();
panic("No CLI available");
}我们先大概分析一下这个函数:
(1)调用 bootstage_mark_name() 函数,打印启动进度。
(2)如果定义了宏 CONFIG_VERSION_VARIABLE 的话就会执行函数 setenv,设置环境变量 ver 的值为 version_string,也就是设置版本号环境变量。
(3)cli_init() 函数,跟命令初始化有关,初始化 hush shell 相关的变量。
(4)run_preboot_environment_command() 函数,获取环境变量 perboot 的内容, perboot 是一些预启动命令,一般不使用这个环境变量。
(5)CONFIG_UPDATE_TFTP 这个宏我们搜索一下就会发现它是没有定义的,所以这里不用管。
(6)bootdelay_process 函数,此函数会读取环境变量 bootdelay 和 bootcmd 的内容,然后将 bootdelay 的值赋值给全局变量 stored_bootdelay,返回值为环境变量 bootcmd 的值。
(7)cli_process_fdt()这里其实就是看这个 CONFIG_OF_CONTROL 有没有定义,如果定义了 CONFIG_OF_CONTROL 的话函数 cli_process_fdt 就会实现,如果没有定义 CONFIG_OF_CONTROL 的话函数 cli_process_fdt 直接返回一个 false。在本 uboot 中 没有定义 CONFIG_OF_CONTROL,因此 cli_process_fdt 函数返回值为 false。 所以这里也不管。
(8)autoboot_command() 函数,此函数就是检查倒计时是否结束?倒计时结束之前有没有被打断? 这里就不展开分析了,后面学习 uboot 启动流程的时候会详细去分析这个函数。
(9)cli_loop() 函数是 uboot 的命令行处理函数,我们在 uboot 中输入各种命令,进行各种操作就是 cli_loop() 来处理的 。所以后面我们重点看一下这个函数。
2. cli_loop()
我们来看一下 cli_loop()这个函数,它定义在 cli.c - common/cli.c 中:
void cli_loop(void)
{
#ifdef CONFIG_HUSH_PARSER
parse_file_outer();
/* This point is never reached */
for (;;);
#elif defined(CONFIG_CMDLINE)
cli_simple_loop();
#else
printf("## U-Boot command line is disabled. Please enable CONFIG_CMDLINE\n");
#endif /*CONFIG_HUSH_PARSER*/
}这里面有两个宏,我们找一找这些宏的定义,没有的就直接去掉,最后简化一下函数就是:
// CONFIG_HUSH_PARSER 存在所以简化一下就是:
void cli_loop(void)
{
parse_file_outer();
/* This point is never reached */
for (;;);
}接下来我们继续看 parse_file_outer();
3. parse_file_outer()
parse_file_outer()这个函数定义在 cli_hush.c - common/cli_hush.c,里面还是一些宏,我们直接根据宏是否定义把函数简化一下:
int parse_file_outer(void)
{
int rcode;
struct in_str input;
setup_file_in_str(&input);
rcode = parse_stream_outer(&input, FLAG_PARSE_SEMICOLON);
return rcode;
}第 6 行调用函数 setup_file_in_str() 初始化变量 input 的成员变量。
第 7 行调用函数 parse_stream_outer(),这个函数就是 hush shell 的命令解释器,负责接收命令行输入,然后解析并执行相应的命令。
4. parse_stream_outer()
接下来肯定是 parse_stream_outer()这个函数了,它定义在 cli_hush.c - common/cli_hush.c,这里还是一样,把里面的宏都去掉,简化后如下:
/* most recursion does not come through here, the exeception is
* from builtin_source() */
static int parse_stream_outer(struct in_str *inp, int flag)
{
struct p_context ctx;
o_string temp=NULL_O_STRING;
int rcode;
int code = 1;
do {
ctx.type = flag;
initialize_context(&ctx);
update_ifs_map();
if (!(flag & FLAG_PARSE_SEMICOLON) || (flag & FLAG_REPARSING)) mapset((uchar *)";$&|", 0);
inp->promptmode=1;
rcode = parse_stream(&temp, &ctx, inp, flag & FLAG_CONT_ON_NEWLINE ? -1 : '\n');
if (rcode == 1) flag_repeat = 0;
if (rcode != 1 && ctx.old_flag != 0) {
syntax();
flag_repeat = 0;
}
if (rcode != 1 && ctx.old_flag == 0) {
done_word(&temp, &ctx);
done_pipe(&ctx,PIPE_SEQ);
code = run_list(ctx.list_head);
if (code == -2) { /* exit */
b_free(&temp);
code = 0;
/* XXX hackish way to not allow exit from main loop */
if (inp->peek == file_peek) {
printf("exit not allowed from main input shell.\n");
continue;
}
break;
}
if (code == -1)
flag_repeat = 0;
} else {
if (ctx.old_flag != 0) {
free(ctx.stack);
b_reset(&temp);
}
if (inp->__promptme == 0) printf("<INTERRUPT>\n");
inp->__promptme = 1;
temp.nonnull = 0;
temp.quote = 0;
inp->p = NULL;
free_pipe_list(ctx.list_head,0);
}
b_free(&temp);
/* loop on syntax errors, return on EOF */
} while (rcode != -1 && !(flag & FLAG_EXIT_FROM_LOOP) &&
(inp->peek != static_peek || b_peek(inp)));
return (code != 0) ? 1 : 0;
}第 11 ~ 56 行中的 do-while 循环就是处理输入命令的。 这里的命令解析什么的我都没有仔细去研究了,内部大概是这样一个调用关系:

5. cmd_process()
前面分析过了,到这个 cmd_process()函数,要经过:
parse_stream_outer()
--> run_list
--> run_list_real()
--> run_pipe_real()
--> cmd_process()中间那几个函数这里就不管了,我看了下好像还挺复杂的,以后有机会再深入分析吧。我们看一下 cmd_process(),它定义在 command.c - common/command.c:
enum command_ret_t cmd_process(int flag, int argc, char * const argv[],
int *repeatable, ulong *ticks)
{
enum command_ret_t rc = CMD_RET_SUCCESS;
cmd_tbl_t *cmdtp;
/* Look up command in command table */
cmdtp = find_cmd(argv[0]);
if (cmdtp == NULL) {
printf("Unknown command '%s' - try 'help'\n", argv[0]);
return 1;
}
/* found - check max args */
if (argc > cmdtp->maxargs)
rc = CMD_RET_USAGE;
#if defined(CONFIG_CMD_BOOTD)
/* avoid "bootd" recursion */
else if (cmdtp->cmd == do_bootd) {
if (flag & CMD_FLAG_BOOTD) {
puts("'bootd' recursion detected\n");
rc = CMD_RET_FAILURE;
} else {
flag |= CMD_FLAG_BOOTD;
}
}
#endif
/* If OK so far, then do the command */
if (!rc) {
int newrep;
if (ticks)
*ticks = get_timer(0);
rc = cmd_call(cmdtp, flag, argc, argv, &newrep);
if (ticks)
*ticks = get_timer(*ticks);
*repeatable &= newrep;
}
if (rc == CMD_RET_USAGE)
rc = cmd_usage(cmdtp);
return rc;
}我们查一下用到的宏都有没有定义,然后把宏都去掉,简化一下,但是发现宏是定义了的,所以简化不了了那我们一个一个看。
5.1 find_cmd()
从名字上看就知道这个是查找命令的,它定义在 command.c - common/command.c:
cmd_tbl_t *find_cmd(const char *cmd)
{
cmd_tbl_t *start = ll_entry_start(cmd_tbl_t, cmd);
const int len = ll_entry_count(cmd_tbl_t, cmd);
return find_cmd_tbl(cmd, start, len);
}可以看到传入的参数是一个字符串类型,由于前面一大部分的调用我们都没分析,这里我们可以加条打印信息,还是以前面的 gpio 命令为例,我们看一下这里传进来的是什么:
cmd_tbl_t *find_cmd(const char *cmd)
{
printf("%s:%d cmd=%s\n", __FUNCTION__, __LINE__, cmd);
cmd_tbl_t *start = ll_entry_start(cmd_tbl_t, cmd);
const int len = ll_entry_count(cmd_tbl_t, cmd);
return find_cmd_tbl(cmd, start, len);
}然后编译烧写到 sd 卡并启动,我们在 uboot 的命令模式下敲以下命令:
=> gpio toggle GPIO1_3可以看到有如下打印信息:
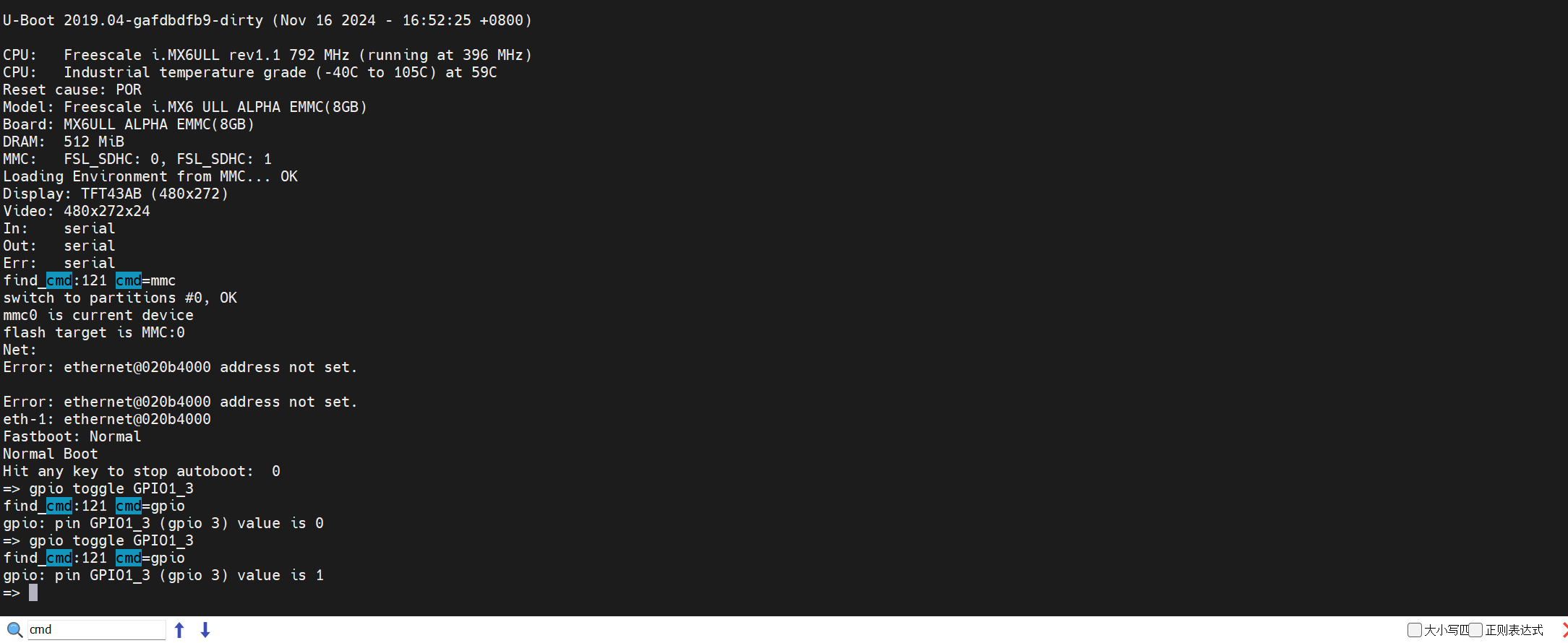
可以看到这里收到的字符串就是敲的 gpio 关键词。
5.1.1 linker_lists
我们先来了解一下 linker_lists 这部分相关的几个宏定义。
5.1.1.1 ll_entry_start
我们来看一下这个 ll_entry_start 在干什么,它不是一个函数,而是一个宏,定义在 linker_lists.h - include/linker_lists.h
/*
* We need a 0-byte-size type for iterator symbols, and the compiler
* does not allow defining objects of C type 'void'. Using an empty
* struct is allowed by the compiler, but causes gcc versions 4.4 and
* below to complain about aliasing. Therefore we use the next best
* thing: zero-sized arrays, which are both 0-byte-size and exempt from
* aliasing warnings.
*/
/**
* ll_entry_start() - Point to first entry of linker-generated array
* @_type: Data type of the entry
* @_list: Name of the list in which this entry is placed
*
* This function returns ``(_type *)`` pointer to the very first entry of a
* linker-generated array placed into subsection of .u_boot_list section
* specified by _list argument.
*
* Since this macro defines an array start symbol, its leftmost index
* must be 2 and its rightmost index must be 1.
*
* Example:
*
* ::
*
* struct my_sub_cmd * msc = ll_entry_start(struct my_sub_cmd, cmd_sub);
*/
#define ll_entry_start(_type, _list) \
({ \
static char start[0] __aligned(4) __attribute__((unused, \
section(".u_boot_list_2_"#_list"_1"))); \
(_type *)&start; \
})这个宏就是声明一个指向_type 类型的_list 数组中第一个元素的类型为_type 指针。所以这也就意味着,我们可以通过这个指针获取到_list 这个数组的首地址。这个宏我们展开一下吧,在 find_cmd()函数中是这样使用的:
cmd_tbl_t *start = ll_entry_start(cmd_tbl_t, cmd);那我们展开它:
// 先把参数替换一下
#define ll_entry_start(cmd_tbl_t, cmd) \
({ \
static char start[0] __aligned(4) __attribute__((unused, \
section(".u_boot_list_2_""cmd""_1"))); \
(cmd_tbl_t *)&start; \
})
// 然后展开得到
cmd_tbl_t *start = {
static char start[0] __aligned(4) __attribute__((unused, section(".u_boot_list_2_""cmd""_1")));
(cmd_tbl_t *)&start;
}以 gpio 命令为例(这里先埋个坑),这里就是:
//这是一种错误的做法
cmd_tbl_t *start = {
static char start[0] __aligned(4) __attribute__((unused, section(".u_boot_list_2_gpio_1")));
(cmd_tbl_t *)&start;
}但是呢,这里不能这么想,这个 .u_boot_list_2_gpio_1 在映射文件中是没有的,我们也找不到这个段,那这里应该怎么搞?我后来在这个宏里面加了打印:
#define ll_entry_start(_type, _list) \
({ \
printf("%s:%d ll_entry_start %s\n", __FUNCTION__, __LINE__, #_list);\
static char start[0] __aligned(4) __attribute__((unused, \
section(".u_boot_list_2_"#_list"_1"))); \
(_type *)&start; \
})
为啥???????其实这里是一个宏,我们是要在预处理阶段就展开的,所以这里我们把这个先展开,不能说是把形参直接替换进去,所以这里展开的过程是对的,就是:
//cmd_tbl_t *start = ll_entry_start(cmd_tbl_t, cmd);
cmd_tbl_t *start = {
static char start[0] __aligned(4) __attribute__((unused, section(".u_boot_list_2_""cmd""_1")));
(cmd_tbl_t *)&start;
}所以,这个 find_cmd()函数就变成了:
cmd_tbl_t *find_cmd(const char *cmd)
{
cmd_tbl_t *start = {
static char start[0] __aligned(4) __attribute__((unused, section(".u_boot_list_2_cmd_1")));
(cmd_tbl_t *)&start;
}
const int len = ll_entry_count(cmd_tbl_t, cmd);
return find_cmd_tbl(cmd, start, len);
}这个样子才对。
5.1.1.2 ll_entry_end
我们直接看一下 ll_entry_end 这个宏,它定义在 linker_lists.h - include/linker_lists.h:
/**
* ll_entry_end() - Point after last entry of linker-generated array
* @_type: Data type of the entry
* @_list: Name of the list in which this entry is placed
* (with underscores instead of dots)
*
* This function returns ``(_type *)`` pointer after the very last entry of
* a linker-generated array placed into subsection of .u_boot_list
* section specified by _list argument.
*
* Since this macro defines an array end symbol, its leftmost index
* must be 2 and its rightmost index must be 3.
*
* Example:
*
* ::
*
* struct my_sub_cmd * msc = ll_entry_end(struct my_sub_cmd, cmd_sub);
*/
#define ll_entry_end(_type, _list) \
({ \
static char end[0] __aligned(4) __attribute__((unused, \
section(".u_boot_list_2_"#_list"_3"))); \
(_type *)&end; \
})声明一个指向_type 类型的_list 数组中最后一个元素的末尾地址的下一个地址的类型为_type 指针。
5.1.1.3 ll_entry_count
我们接着来看这个 ll_entry_count,它也是一个宏,定义在 linker_lists.h - include/linker_lists.h:
/**
* ll_entry_count() - Return the number of elements in linker-generated array
* @_type: Data type of the entry
* @_list: Name of the list of which the number of elements is computed
*
* This function returns the number of elements of a linker-generated array
* placed into subsection of .u_boot_list section specified by _list
* argument. The result is of an unsigned int type.
*
* Example:
*
* ::
*
* int i;
* const unsigned int count = ll_entry_count(struct my_sub_cmd, cmd_sub);
* struct my_sub_cmd * msc = ll_entry_start(struct my_sub_cmd, cmd_sub);
* for (i = 0; i < count; i++, msc++)
* printf("Entry %i, x =%i y =%i\n", i, msc-> x, msc-> y);
*/
#define ll_entry_count(_type, _list) \
({ \
_type *start = ll_entry_start(_type, _list); \
_type *end = ll_entry_end(_type, _list); \
unsigned int _ll_result = end - start; \
_ll_result; \
})这个宏是返回_type 类型的_list 数组中元素个数。前面已经找到了\list 数组的起始地址 ll_entry_start 和结束地址 ll_entry_end,两者相减就是中间元素的个数。
5.1.1.4 ll_entry_declare
前面我们分析 gpio 命令声明的时候有展开过它,它是定义在 linker_lists.h - include/linker_lists.h:
/**
* ll_entry_declare() - Declare linker-generated array entry
* @_type: Data type of the entry
* @_name: Name of the entry
* @_list: name of the list. Should contain only characters allowed
* in a C variable name!
*
* This macro declares a variable that is placed into a linker-generated
* array. This is a basic building block for more advanced use of linker-
* generated arrays. The user is expected to build their own macro wrapper
* around this one.
*
* A variable declared using this macro must be compile-time initialized.
*
* Special precaution must be made when using this macro:
*
* 1) The _type must not contain the "static" keyword, otherwise the
* entry is generated and can be iterated but is listed in the map
* file and cannot be retrieved by name.
*
* 2) In case a section is declared that contains some array elements AND
* a subsection of this section is declared and contains some elements,
* it is imperative that the elements are of the same type.
*
* 3) In case an outer section is declared that contains some array elements
* AND an inner subsection of this section is declared and contains some
* elements, then when traversing the outer section, even the elements of
* the inner sections are present in the array.
*
* Example:
*
* ::
*
* ll_entry_declare(struct my_sub_cmd, my_sub_cmd, cmd_sub) = {
* .x = 3,
* .y = 4,
* };
*/
#define ll_entry_declare(_type, _name, _list) \
_type _u_boot_list_2_##_list##_2_##_name __aligned(4) \
__attribute__((unused, \
section(".u_boot_list_2_"#_list"_2_"#_name)))在_list 数组中声明一个链接器产生的_type 类型命名为 name 的元素。
5.1.1.5 linker list 分析
这一部分我们可以参考 linker_lists.rst - Documentation/linker_lists.rst 或者我的 uboot 的源码仓库 doc/linker_lists.rst。
上面我们接触到了四个宏:
#define ll_entry_start(_type, _list) \
({ \
static char start[0] __aligned(4) __attribute__((unused, \
section(".u_boot_list_2_"#_list"_1"))); \
(_type *)&start; \
})
#define ll_entry_end(_type, _list) \
({ \
static char end[0] __aligned(4) __attribute__((unused, \
section(".u_boot_list_2_"#_list"_3"))); \
(_type *)&end; \
})
#define ll_entry_count(_type, _list) \
({ \
_type *start = ll_entry_start(_type, _list); \
_type *end = ll_entry_end(_type, _list); \
unsigned int _ll_result = end - start; \
_ll_result; \
})
#define ll_entry_declare(_type, _name, _list) \
_type _u_boot_list_2_##_list##_2_##_name __aligned(4) \
__attribute__((unused, \
section(".u_boot_list_2_"#_list"_2_"#_name)))为了计算数组中元素的个数定义了 ll_entry_start 和 ll_entry_end 两个宏,在 link_list 数据结构中段的命名都是以 .u_boot_list_2_ 开始,.u_boot_list_2_"#_list"_2_"#_name 中_list 为数组项名称,_name 数组项下的元素名称,我们其实可以先去 u-boot.map 文件中看一下 uboot 中都定义了哪些数组(01_uboot/01_gpio_cmd/u-boot.map), 这里列举两部分(这里应该可以理解为数组):
.u_boot_list_2_cmd
.u_boot_list_2_cmd_1
0x00000000878899b4 0x0 cmd/built-in.o
.u_boot_list_2_cmd_1
0x00000000878899b4 0x0 common/built-in.o
.u_boot_list_2_cmd_2_base
0x00000000878899b4 0x1c cmd/built-in.o
0x00000000878899b4 _u_boot_list_2_cmd_2_base
/*中间省略*/
.u_boot_list_2_cmd_2_gpio
0x0000000087889ed8 0x1c cmd/built-in.o
0x0000000087889ed8 _u_boot_list_2_cmd_2_gpio
/*中间省略*/
.u_boot_list_2_cmd_2_mmc
0x000000008788a0ec 0x1c cmd/built-in.o
0x000000008788a0ec _u_boot_list_2_cmd_2_mmc
/*中间省略*/
.u_boot_list_2_cmd_2_version
0x000000008788a3fc 0x1c cmd/built-in.o
0x000000008788a3fc _u_boot_list_2_cmd_2_version
.u_boot_list_2_cmd_3
0x000000008788a418 0x0 cmd/built-in.o
.u_boot_list_2_cmd_3
0x000000008788a418 0x0 common/built-in.o.u_boot_list_2_driver
.u_boot_list_2_driver_1
0x000000008788a418 0x0 drivers/built-in.o
.u_boot_list_2_driver_1
0x000000008788a418 0x0 lib/built-in.o
.u_boot_list_2_driver_2_74x164
0x000000008788a418 0x48 drivers/gpio/built-in.o
0x000000008788a418 _u_boot_list_2_driver_2_74x164
/*中间省略*/
.u_boot_list_2_driver_2_usb_storage_blk
0x000000008788abb0 0x48 common/built-in.o
0x000000008788abb0 _u_boot_list_2_driver_2_usb_storage_blk
.u_boot_list_2_driver_3
0x000000008788abf8 0x0 drivers/built-in.o
.u_boot_list_2_driver_3
0x000000008788abf8 0x0 lib/built-in.o可以看到这里两种数组都是 ".u_boot_list_2_"#_list"_1" 开始,".u_boot_list_2_"#_list"_3" 结束,中间的 ".u_boot_list_2_"#_list"_2" 是各个命令,我们可以看一下链接文件 u-boot.lds(01_uboot/01_gpio_cmd/u-boot.lds)里面有这么一段:
. = .;
. = ALIGN(4);
.u_boot_list : {
KEEP(*(SORT(.u_boot_list*)));
}从链接脚本中,我们可以知道 .u_boot_list 开头的段都会按照字符顺序进行排序,如 .u_boot_list_3*、.u_boot_list_2* 、.u_boot_list_1* ,则链接器链接的时候就以 .u_boot_list_1* 、.u_boot_list_2* 、.u_boot_list_3* 的顺序进行链接。
为了方便获取起始和结束地址,在所有 .u_boot_list_2* 段前面插入一个 .u_boot_list_1 段,在 u_boot_list_2* 段后面插入一个 .u_boot_list_3 段,这两个段不分配任何内存,让 u_boot_list_1 指向 .u_boot_list_2* 开始的起始地址,让 u_boot_list_3 指向最后 .u_boot_list_2* 最后一个地址的下一个地址,这样{(.u_boot_list_3)-(.u_boot_list_1)=(.u_boot_list_2* 所占内存大小)},在这里可以使用一个空数组 start[0]进行定位,因为数组长度为 0,所以不分配内存,但是它指向的地址时当前所在位置,他赋予属性,将他放在 .u_boot_list_1 段,这样 start[0]就可以指向下一个段的起始地址,下个段为 .u_boot_list_2*。
同理在 .u_boot_list_2* 末尾插入 .u_boot_list_3 段,使用一个空数组 end[0],并且将它放到 .u_boot_list_3 段,这样 end[0]就指向 .u_boot_list_3 后面的第一个地址。如果 start 和 end 强制为 char 型指针,那(end-start)就是 .u_boot_list_2* 所占内存大小,如果是_type 类型,那么(.u_boot_list_2* 所占内存大小)= sizeof(_type)*(start-end)
同理也可以计算 _u_boot_list_2_##_list##_2_##_name 的内存大小或数组元素个数,为什么将这个_list 列表称之为数组,是因为在 ll_entry_declare 宏定义时就要求相同的_list 下的元素的数据类型必须一致,例如_list 名为 cmd 的数据类型就为 struct cmd_tbl_t 结构体,driver 的数据类型为 struct driver 结构体。因为链接脚本中对 .u_boot_list* 段进行了排序,.u_boot_list_2_cmd_2_* 段会排放在一起,自然而然这些段中的变量 _u_boot_list_2_cmd_2_* 就会被放在连续的地址空间,数据类型又是相同的,所以和数组的属性一致,因此将之称之为数组。
同上在 .u_boot_list_2_cmd_2_* 段的起始地址插一个 .u_boot_list_2_cmd_1 段,并且存放一个空数组 start[0],让指向 _u_boot_list_2_cmd_2_* 数组第一个变量,在 _u_boot_list_2_cmd_2_* 数组结束后插入一个 .u_boot_list_2_cmd_3 段,存放一个空数组 end[0],end 指向 _u_boot_list_2_cmd_2_* 数组列结束后的第一个地址,然后将 end 和 start 强制转化为 struct cmd_tbl_t 结构体指针,这样(end-start)=(_u_boot_list_2_cmd_2_*)数组元素的个数。
5.1.1.6 u_boot_list_2_cmd_1 怎么来的?
上面其实分析完有一个疑问,就是 .u_boot_list_2_cmd_1 和 .u_boot_list_2_cmd_3 是怎么来的?我们每次通过 U_BOOT_CMD 定义命令的时候会使用 ll_entry_declare 宏来定义一个链接到 .u_boot_list_2_cmd_2_* 段的 _u_boot_list_2_cmd_2_* 命令,但是用于寻找开始起始和末尾的两个段怎么被插入的?我其实找了半天,最后就发现,这两个段相关的关键词就在这两个宏里面:
#define ll_entry_start(_type, _list) \
({ \
static char start[0] __aligned(4) __attribute__((unused, \
section(".u_boot_list_2_"#_list"_1"))); \
(_type *)&start; \
})
#define ll_entry_end(_type, _list) \
({ \
static char end[0] __aligned(4) __attribute__((unused, \
section(".u_boot_list_2_"#_list"_3"))); \
(_type *)&end; \
})别的地方找不到,那么肯定是在某个地方使用了这两个宏的,所以在链接的时候才会出现这两个段。虽然找不到,但是我们可以加打印啊,虽然这样其实不是很合理,但是试一下吧,看一看程序一开始从哪出现的:
#define ll_entry_start(_type, _list) \
({ \
printf("[%s:%d] _list=%s, %s\n", __FUNCTION__, __LINE__, #_list, ".u_boot_list_2_"#_list"_1");\
static char start[0] __aligned(4) __attribute__((unused, \
section(".u_boot_list_2_"#_list"_1"))); \
(_type *)&start; \
})
#define ll_entry_end(_type, _list) \
({ \
printf("[%s:%d] _list=%s, %s\n", __FUNCTION__, __LINE__, #_list, ".u_boot_list_2_"#_list"_3");\
static char end[0] __aligned(4) __attribute__((unused, \
section(".u_boot_list_2_"#_list"_3"))); \
(_type *)&end; \
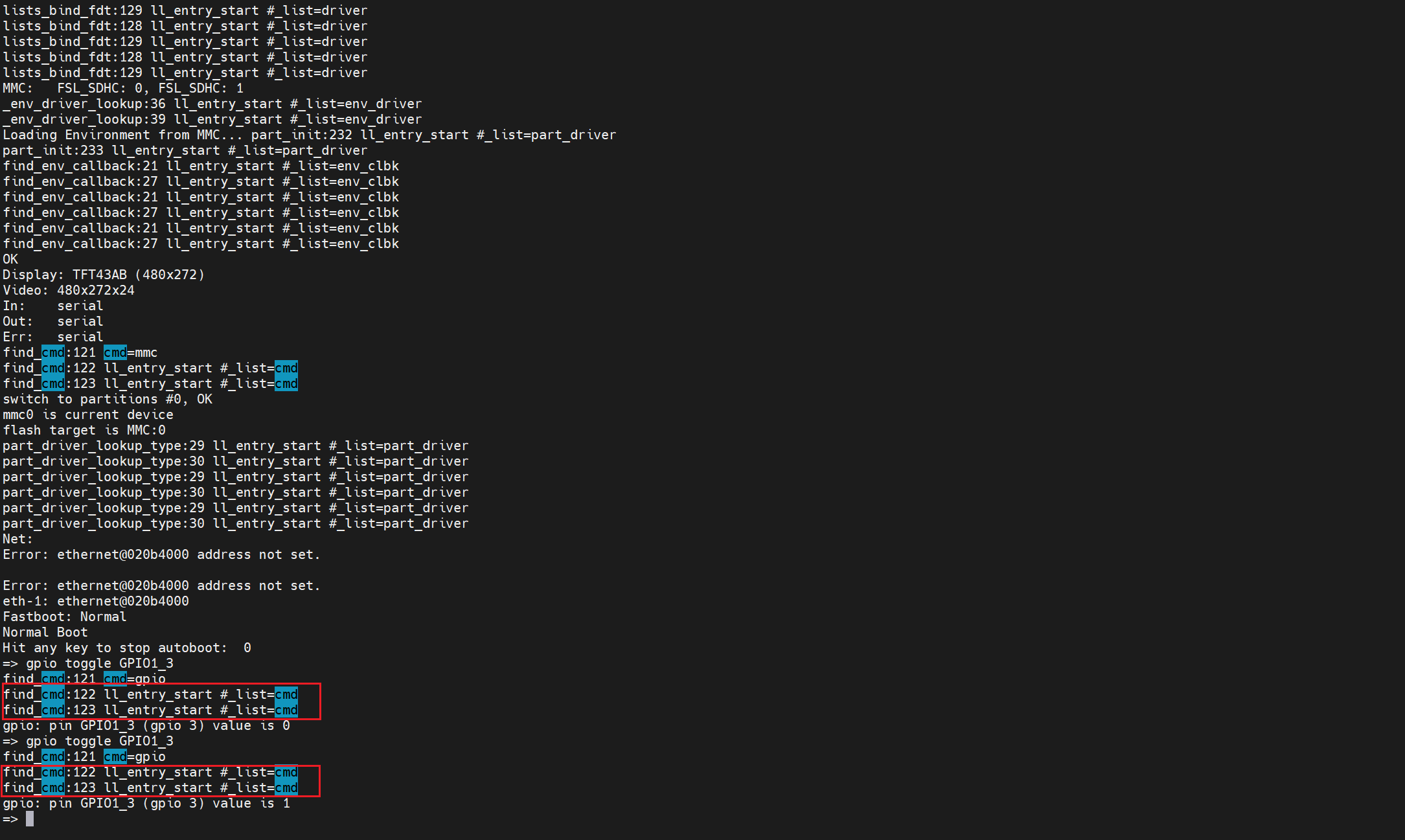
})然后打印信息如下:
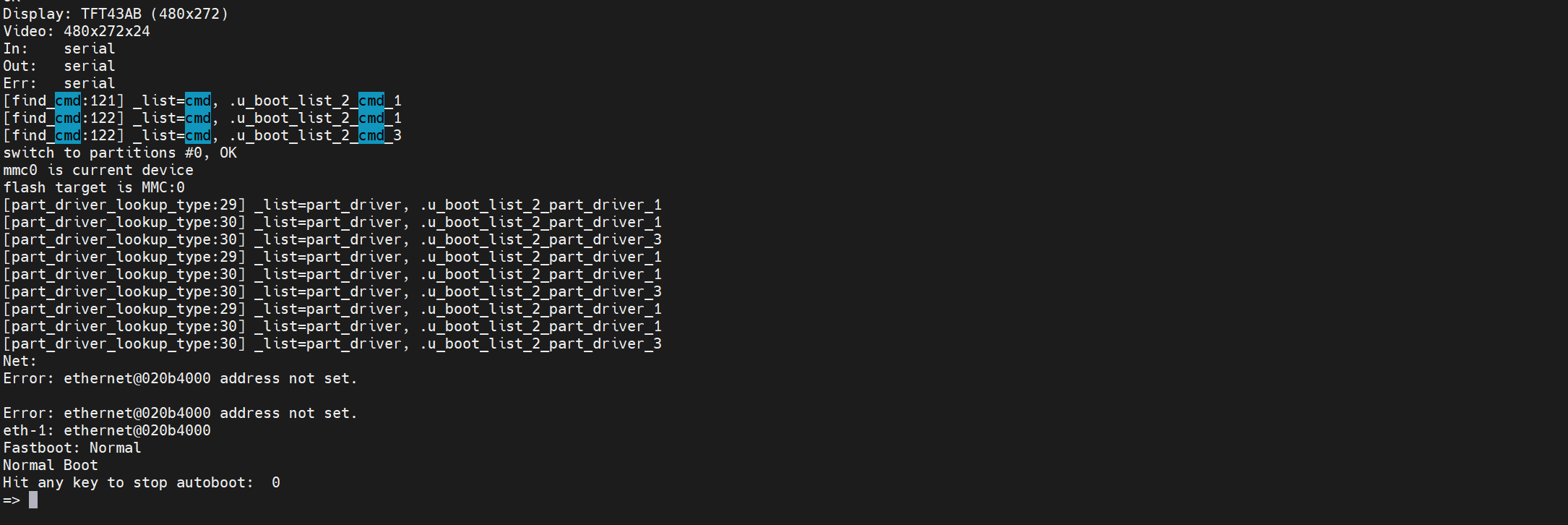
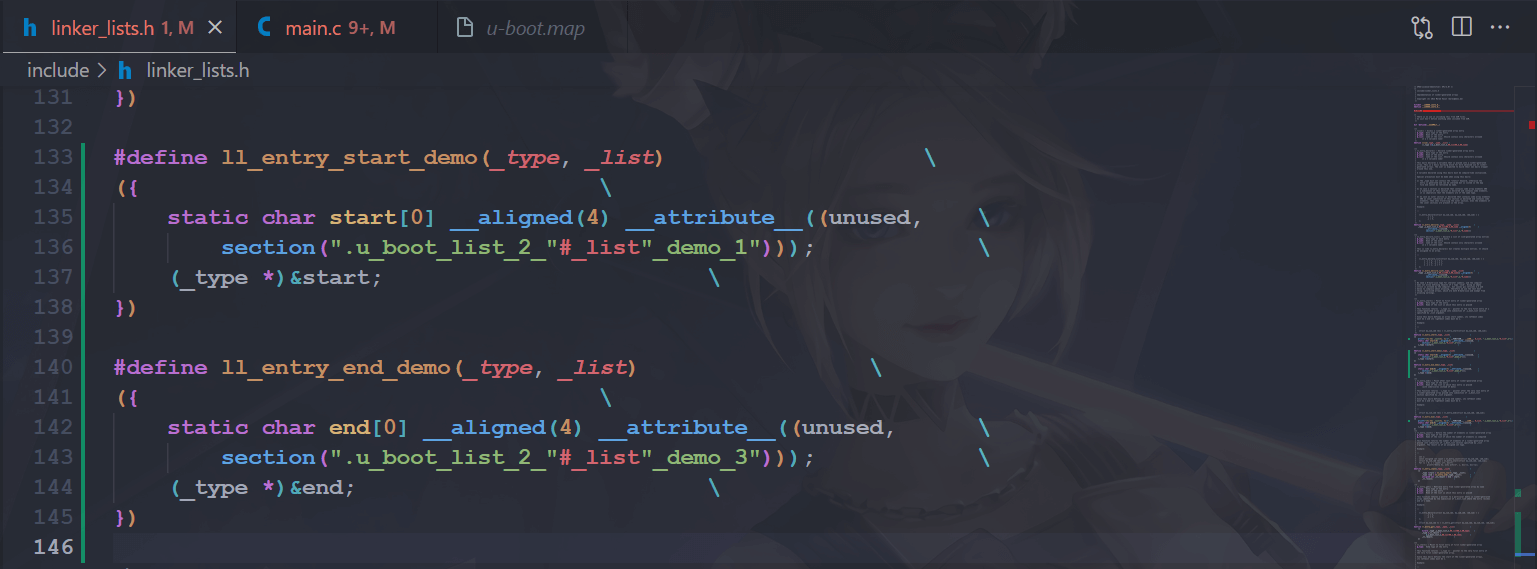
发现其实就是在这个寻找命令的地方,所以其实可能并没有什么用,据我推测,可能是因为宏里面是 static 类型的数组名,虽然是 0 个元素,不分配内存,但是还是会被链接到对应的段中。我们可以试一下,就随便定义一个吧,在 linker_lists.h - include/linker_lists.h 里面定义:
#define ll_entry_start_demo(_type, _list) \
({ \
static char start[0] __aligned(4) __attribute__((unused, \
section(".u_boot_list_2_"#_list"_demo_1"))); \
(_type *)&start; \
})
#define ll_entry_end_demo(_type, _list) \
({ \
static char end[0] __aligned(4) __attribute__((unused, \
section(".u_boot_list_2_"#_list"_demo_3"))); \
(_type *)&end; \
})就这样:
然后我们去随便定义一个变量,让这个宏展开,就去 main.c - common/main.c 里面搞:
int *p1 = ll_entry_start_demo(int, sumu);
int *p2 = ll_entry_end_demo(int, sumu);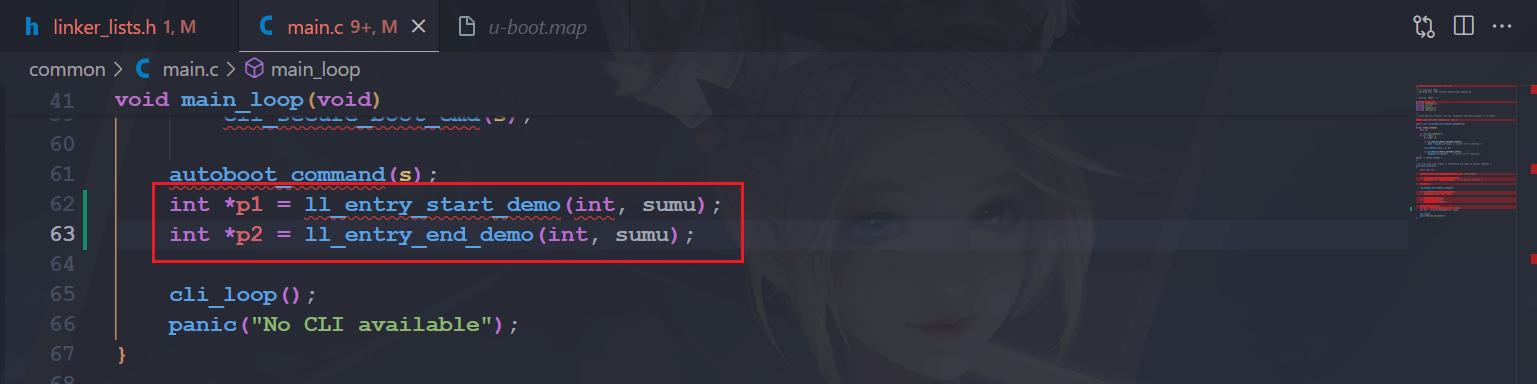
然后我们编译一下,编译完去看映射文件,搜索一下 sumu 关键词,发现啥都没有,大概应该是这两个局部变量没有使用,直接被优化掉了,根本没有参与链接,那么我们使用一下这两个变量:
int *p1 = ll_entry_start_demo(int, sumu);
int *p2 = ll_entry_end_demo(int, sumu);
printf("p1=%p p2=%p\n", p1, p2);然后再编译,再搜索,就会发现,这两个段出现了:

其实通过以上实验就可以知道,这两个段,只要有调用的地方,就一定会插入进去。
5.1.2 find_cmd_tbl()
最后我们再看一下这个 find_cmd_tbl()函数,它定义在 command.c - common/command.c:
/* find command table entry for a command */
cmd_tbl_t *find_cmd_tbl(const char *cmd, cmd_tbl_t *table, int table_len)
{
#ifdef CONFIG_CMDLINE
cmd_tbl_t *cmdtp;
cmd_tbl_t *cmdtp_temp = table; /* Init value */
const char *p;
int len;
int n_found = 0;
if (!cmd)
return NULL;
/*
* Some commands allow length modifiers (like "cp.b");
* compare command name only until first dot.
*/
len = ((p = strchr(cmd, '.')) == NULL) ? strlen (cmd) : (p - cmd);
for (cmdtp = table; cmdtp != table + table_len; cmdtp++) {
if (strncmp(cmd, cmdtp->name, len) == 0) {
if (len == strlen(cmdtp->name))
return cmdtp; /* full match */
cmdtp_temp = cmdtp; /* abbreviated command ? */
n_found++;
}
}
if (n_found == 1) { /* exactly one match */
return cmdtp_temp;
}
#endif /* CONFIG_CMDLINE */
return NULL; /* not found or ambiguous command */
}这个函数主要是在命令列表里面找到我们的命令。我们可以看一下传入的参数:
find_cmd_tbl(cmd, start, len);cmd 就是前面我们的 gpio 命令字符串,start 就是 .u_boot_list_2_cmd_1 的地址,len 就是 _u_boot_list_2_cmd_2_* 列表的长度。所以这里其实就是把 _u_boot_list_2_cmd_2_* 列表的数据遍历一遍,找到 name 为字符串的命令,找到了就返回这个命令的地址,没找到就返回一个 NULL。返回的这个命令包含哪些信息?我们来看一下这个 cmd_tbl_t 类型就知道了 command.h - include/command.h,其实前面分析 gpio 命令的时候有了解过的:
struct cmd_tbl_s {
char *name; /* Command Name */
int maxargs; /* maximum number of arguments */
int (*cmd_rep)(struct cmd_tbl_s *cmd, int flags, int argc, char * const argv[], int *repeatable); /* Implementation function */
int (*cmd)(struct cmd_tbl_s *, int, int, char * const []);
char *usage; /* Usage message (short) */
char *help; /* Help message (long) */
int (*complete)(int argc, char * const argv[], char last_char, int maxv, char *cmdv[]);/* do auto completion on the arguments */
};结合展开的 gpio 命令变量:
cmd_tbl_t _u_boot_list_2_cmd_2_gpio __aligned(4)
__attribute__((unused, section(".u_boot_list_2_cmd_2_gpio"))) = {
"gpio",
4,
cmd_never_repeatable,
do_gpio,
"query and control gpio pins",
"<input|set|clear|toggle> <pin>\n"
" - input/set/clear/toggle the specified pin\n"
"gpio status [-a] [<bank> | <pin>] - show [all/claimed] GPIOs",
NULL,};可以知道这个 find_cmd_tbl()函数返回的就这些数据:
_u_boot_list_2_cmd_2_gpio.name = "gpio"
_u_boot_list_2_cmd_2_gpio.maxargs = 4;
_u_boot_list_2_cmd_2_gpio.cmd_rep = cmd_never_repeatable;
_u_boot_list_2_cmd_2_gpio.cmd = do_gpio;
_u_boot_list_2_cmd_2_gpio.usage = "query and control gpio pins"
_u_boot_list_2_cmd_2_gpio.help = "<input|set|clear|toggle> <pin>\n"
" - input/set/clear/toggle the specified pin\n"
"gpio status [-a] [<bank> | <pin>] - show [all/claimed] GPIOs"
_u_boot_list_2_cmd_2_gpio.complete = NULL;5.2 cmd_call()
上面我们已经找到了 gpio 命令的信息,接下来就该执行了,我们看 cmd_process 函数中是调用了 cmd_call()函数来执行,这个函数定义在 command.c - common/command.c:
/**
* Call a command function. This should be the only route in U-Boot to call
* a command, so that we can track whether we are waiting for input or
* executing a command.
*
* @param cmdtp Pointer to the command to execute
* @param flag Some flags normally 0 (see CMD_FLAG_.. above)
* @param argc Number of arguments (arg 0 must be the command text)
* @param argv Arguments
* @param repeatable Can the command be repeated
* @return 0 if command succeeded, else non-zero (CMD_RET_...)
*/
static int cmd_call(cmd_tbl_t *cmdtp, int flag, int argc, char * const argv[],
int *repeatable)
{
int result;
result = cmdtp->cmd_rep(cmdtp, flag, argc, argv, repeatable);
if (result)
debug("Command failed, result=%d\n", result);
return result;
}可以看到这个是在调用 cmd_rep 这个函数指针,前面在 gpio 命令中,这个函数指针指向了 cmd_never_repeatable()。
5.3 cmd_never_repeatable()
我们再去详细看一下这个 cmd_never_repeatable()函数,它是定义在 command.c - common/command.c:
int cmd_never_repeatable(cmd_tbl_t *cmdtp, int flag, int argc,
char * const argv[], int *repeatable)
{
*repeatable = 0;
return cmdtp->cmd(cmdtp, flag, argc, argv);
}这里又调用了 cmd 函数指针,前面参数一路传进来,其实这里的 cmd 在 gpio 命令中就是 do_gpio()函数。
6. 总结一下
前面经过一步一步的分析,最终执行到 do_gpio()函数,我们来回顾一下这个过程:
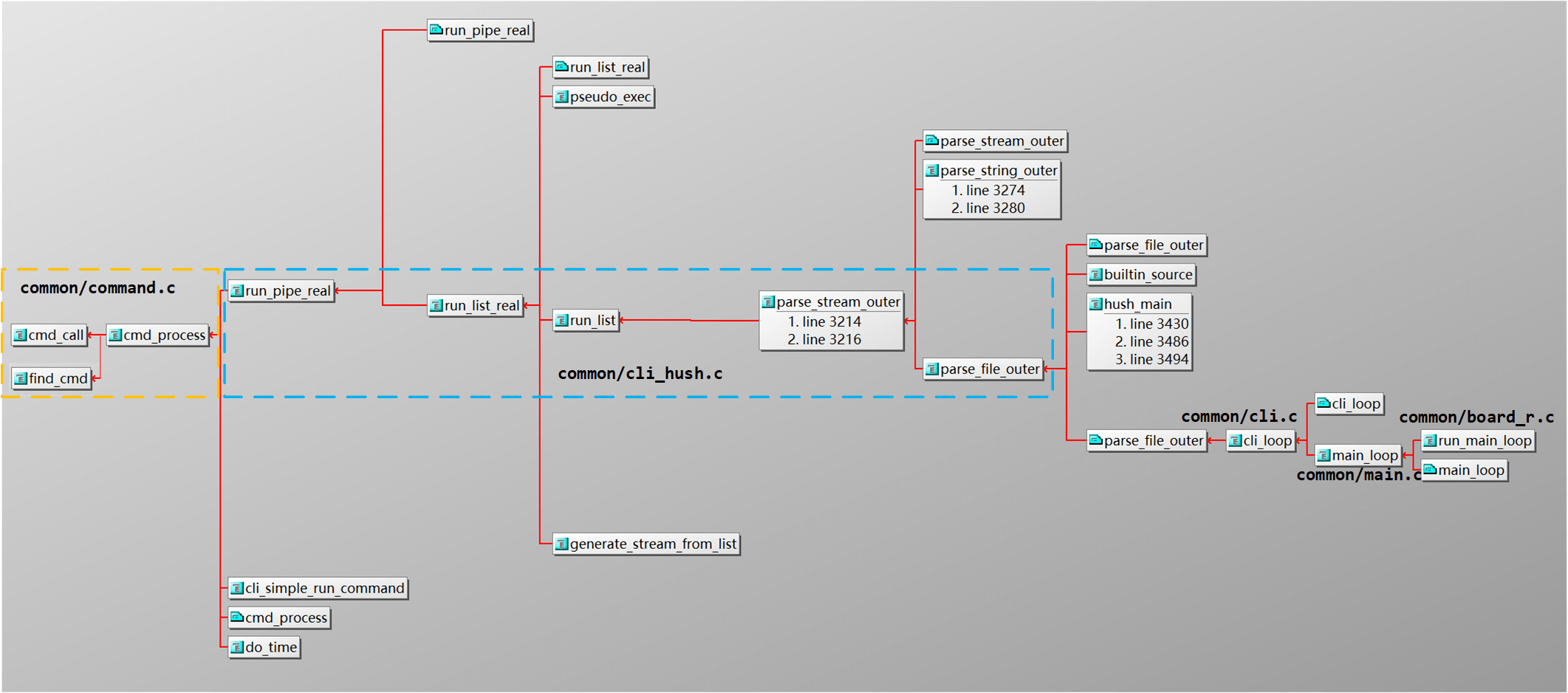
函数调用关系如上图所示。
参考资料:
u-boot 的 linker list 源码分析_uboot env callback-CSDN 博客
链接脚本(Linker Scripts)语法和规则解析(自官方手册) - BSP-路人甲 - 博客园 (cnblogs.com)